 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Learning and Self-Teaching Techniques for Domain Adaptation in Semantic Segmentation
Paper and Code
Sep 02, 2019
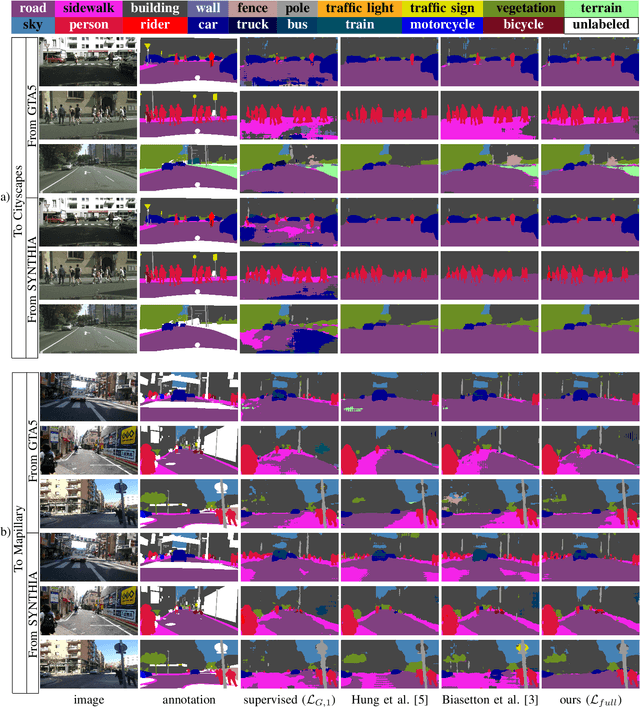

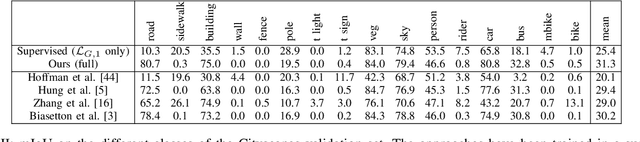
Deep learning techniques have been widely used in autonomous driving systems for the semantic understanding of urban scenes, however they need a huge amount of labeled data for training, which is difficult and expensive to acquire. A recently proposed workaround is to train deep networks using synthetic data, however the domain shift between real world and synthetic representations limits the performance. In this work a novel unsupervised domain adaptation strategy is introduced to solve this issue. The proposed learning strategy is driven by three components: a standard supervised learning loss on labeled synthetic data, an adversarial learning module that exploits both labeled synthetic data and unlabeled real data and finally a self-teaching strategy exploiting unlabeled data. The last component exploits a region growing framework guided by the segmentation confidence. Furthermore, we weighted this component on the basis of the class frequencies to enhance the performance on less common classes. Experimental results prove the effectiveness of the proposed strategy in adapting a segmentation network trained on synthetic datasets, like GTA5 and SYNTHIA, to real world datasets like Cityscapes and Mapillary.