 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Attack in the Context of Self-driving
Paper and Code
Apr 05, 2021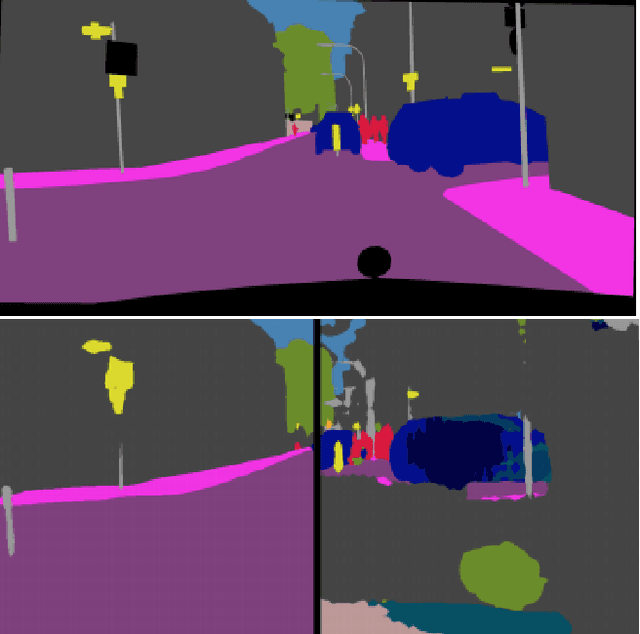
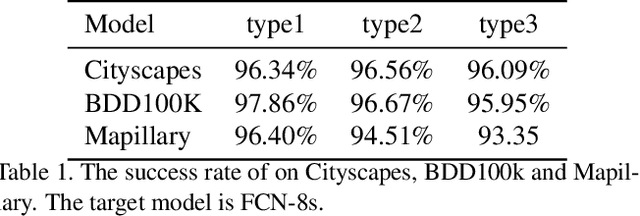
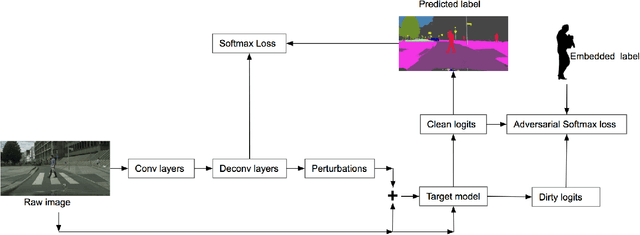
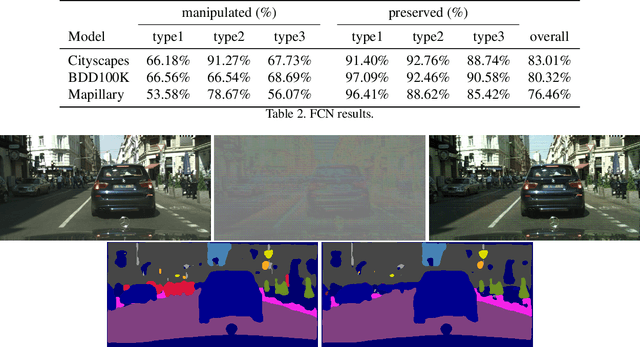
In this paper, we propose a model that can attack segmentation models with semantic and dynamic targets in the context of self-driving. Specifically, our model is designed to map an input image as well as its corresponding label to perturbations. After adding the perturbation to the input image, the adversarial example can manipulate the labels of the pixels in a semantically meaningful way on dynamic targets. In this way, we can make a potential attack subtle and stealthy. To evaluate the stealthiness of our attacking model, we design three types of tasks, including hiding true labels in the context, generating fake labels, and displacing labels that belong to some category. The experiments show that our model can attack segmentation models efficiently with a relatively high success rate on Cityscapes, Mapillary, and BDD100K. We also evaluate the generalization of our model across different datasets. Finally, we propose a new metric to evaluate the parameter-wise efficiency of attacking models by comparing the number of parameters used by both the attacking models and the target models.