Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvances in Human-Robot Handshaking
Paper and Code
Aug 26, 2020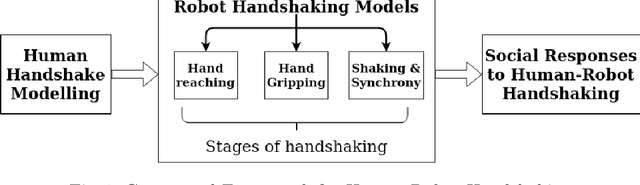
The use of social, anthropomorphic robots to support humans in various industries has been on the rise. During Human-Robot Interaction (HRI), physically interactive non-verbal behaviour is key for more natural interactions. Handshaking is one such natural interaction used commonly in many social contexts. It is one of the first non-verbal interactions which takes place and should, therefore, be part of the repertoire of a social robot. In this paper, we explore the existing state of Human-Robot Handshaking and discuss possible ways forward for such physically interactive behaviours.
* Accepted at The 12th International Conference on Social Robotics
(ICSR 2020) 12 Pages, 1 Figure
View paper on