 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced Feature Learning on Point Clouds using Multi-resolution Features and Learnable Pooling
Paper and Code

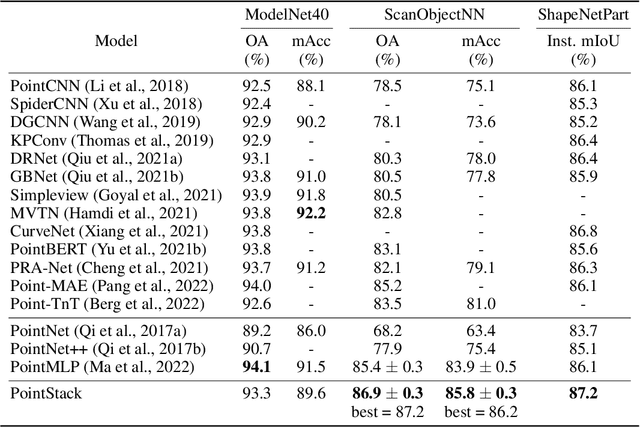


Existing point cloud feature learning networks often incorporate sequences of sampling, neighborhood grouping, neighborhood-wise feature learning, and feature aggregation to learn high-semantic point features that represent the global context of a point cloud. Unfortunately, the compounded loss of information concerning granularity and non-maximum point features due to sampling and max pooling could adversely affect the high-semantic point features from existing networks such that they are insufficient to represent the local context of a point cloud, which in turn may hinder the network in distinguishing fine shapes. To cope with this problem, we propose a novel point cloud feature learning network, PointStack, using multi-resolution feature learning and learnable pooling (LP). The multi-resolution feature learning is realized by aggregating point features of various resolutions in the multiple layers, so that the final point features contain both high-semantic and high-resolution information. On the other hand, the LP is used as a generalized pooling function that calculates the weighted sum of multi-resolution point features through the attention mechanism with learnable queries, in order to extract all possible information from all available point features. Consequently, PointStack is capable of extracting high-semantic point features with minimal loss of information concerning granularity and non-maximum point features. Therefore, the final aggregated point features can effectively represent both global and local contexts of a point cloud. In addition, both the global structure and the local shape details of a point cloud can be well comprehended by the network head, which enables PointStack to advance the state-of-the-art of feature learning on point clouds. The codes are available at https://github.com/kaist-avelab/PointStack.