 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Risk Tendency: Nano Drone Navigation in Cluttered Environments with Distributional Reinforcement Learning
Paper and Code
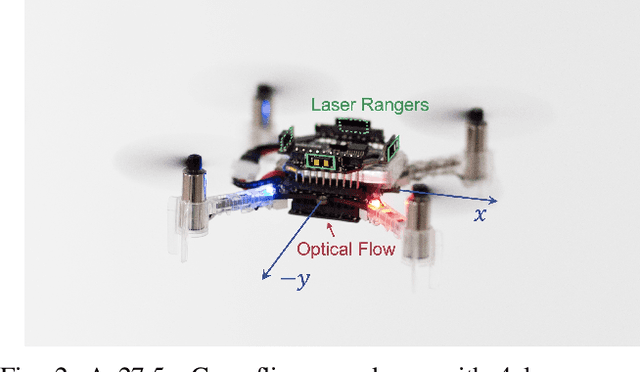
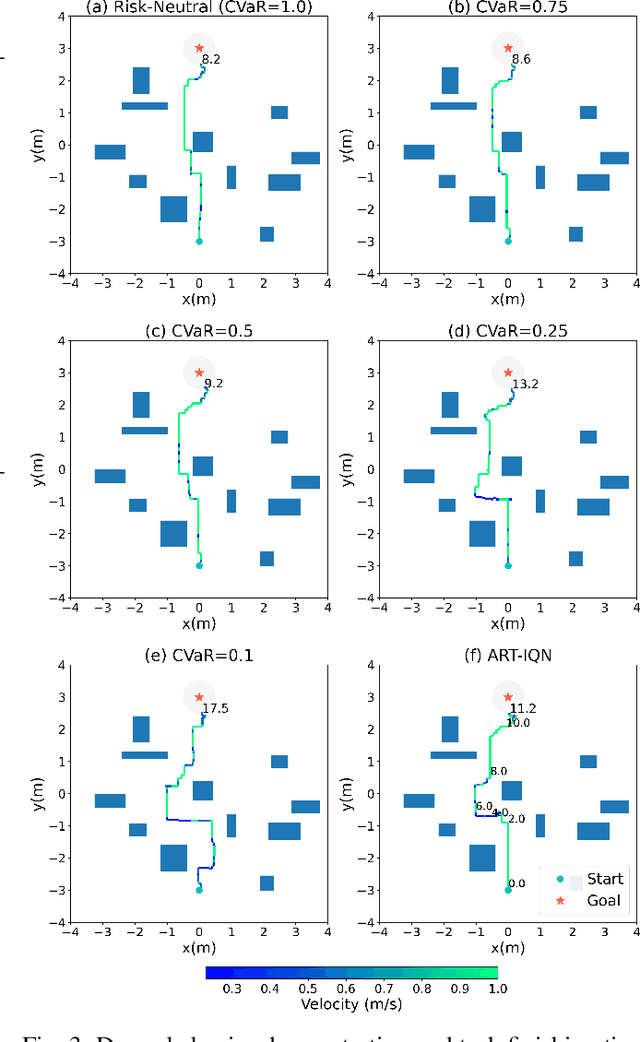
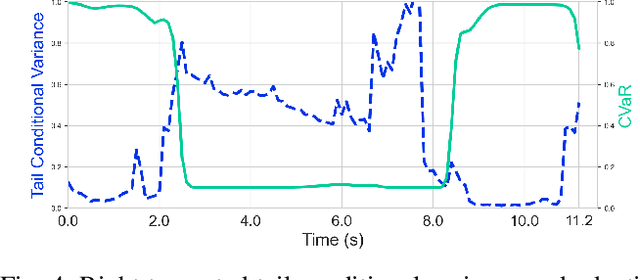
Enabling robots with the capability of assessing risk and making risk-aware decisions is widely considered a key step toward ensuring robustness for robots operating under uncertainty. In this paper, we consider the specific case of a nano drone robot learning to navigate an apriori unknown environment while avoiding obstacles under partial observability. We present a distributional reinforcement learning framework in order to learn adaptive risk tendency policies. Specifically, we propose to use tail conditional variance of the learnt action-value distribution as an uncertainty measurement, and use a exponentially weighted average forecasting algorithm to automatically adapt the risk-tendency at run-time based on the observed uncertainty in the environment. We show our algorithm can adjust its risk-sensitivity on the fly both in simulation and real-world experiments and achieving better performance than risk-neutral policy or risk-averse policies. Code and real-world experiment video can be found in this repository: \url{https://github.com/tudelft/risk-sensitive-rl.git}