 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Koopman Embedding for Robust Control of Complex Dynamical Systems
Paper and Code
May 15, 2024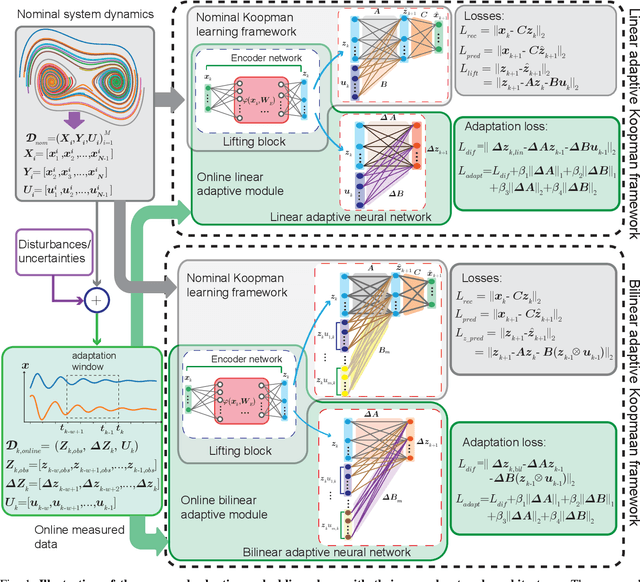
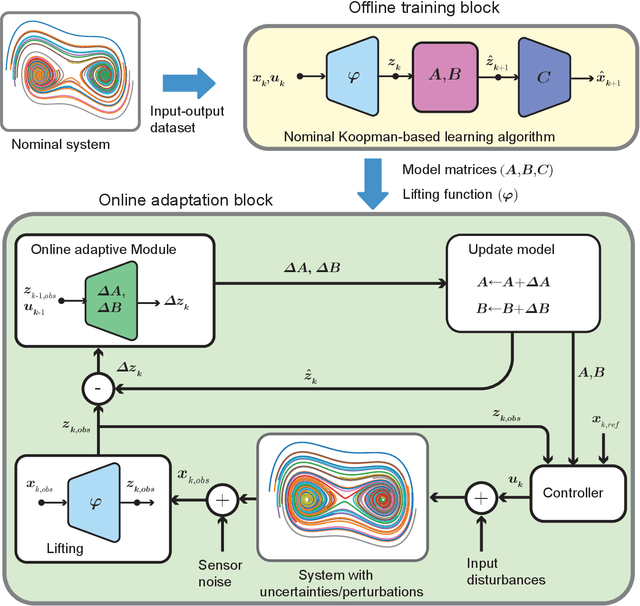
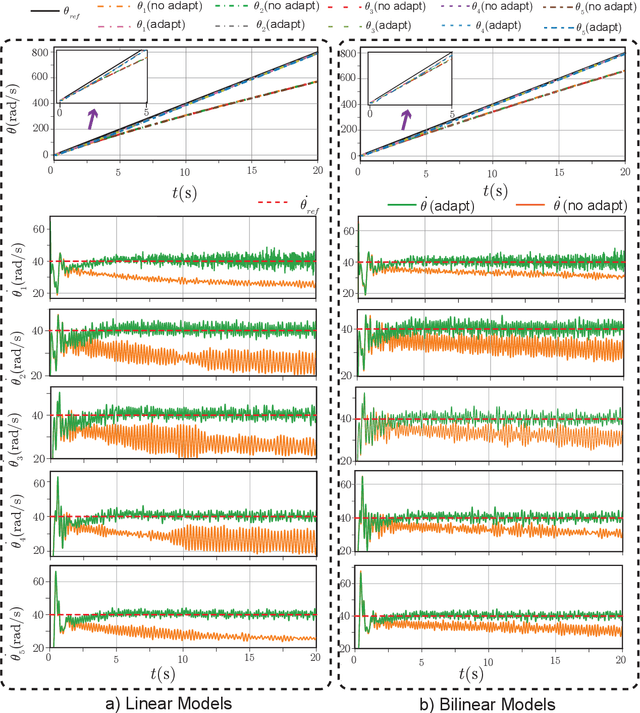
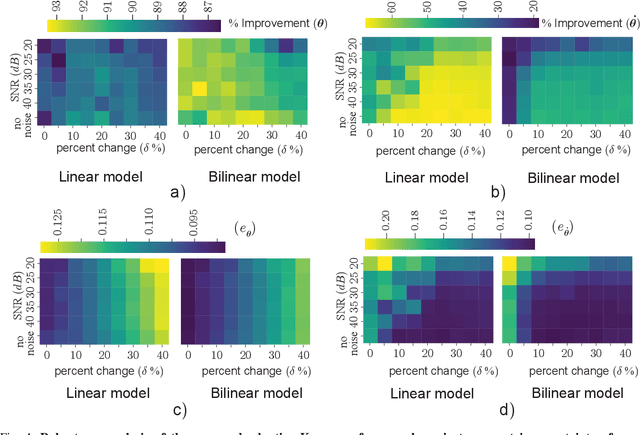
The discovery of linear embedding is the key to the synthesis of linear control techniques for nonlinear systems. In recent years, while Koopman operator theory has become a prominent approach for learning these linear embeddings through data-driven methods, these algorithms often exhibit limitations in generalizability beyond the distribution captured by training data and are not robust to changes in the nominal system dynamics induced by intrinsic or environmental factors. To overcome these limitations, this study presents an adaptive Koopman architecture capable of responding to the changes in system dynamics online. The proposed framework initially employs an autoencoder-based neural network that utilizes input-output information from the nominal system to learn the corresponding Koopman embedding offline. Subsequently, we augment this nominal Koopman architecture with a feed-forward neural network that learns to modify the nominal dynamics in response to any deviation between the predicted and observed lifted states, leading to improved generalization and robustness to a wide range of uncertainties and disturbances compared to contemporary methods. Extensive tracking control simulations, which are undertaken by integrating the proposed scheme within a Model Predictive Control framework, are used to highlight its robustness against measurement noise, disturbances, and parametric variations in system dynamics.