 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive-Frequency Model Learning and Predictive Control for Dynamic Maneuvers on Legged Robots
Paper and Code
Jul 20, 2024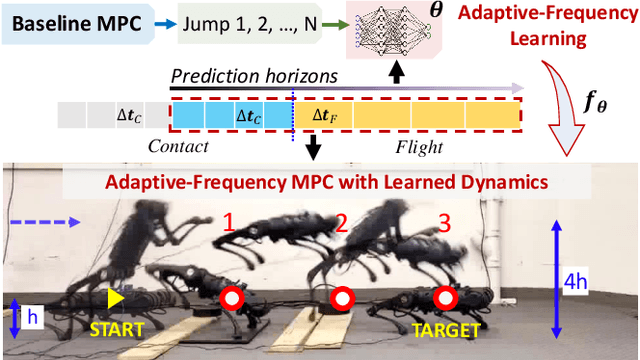
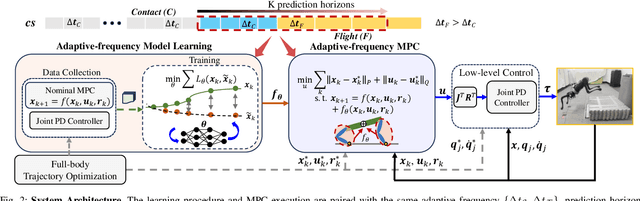


Achieving both target accuracy and robustness in dynamic maneuvers with long flight phases, such as high or long jumps, has been a significant challenge for legged robots. To address this challenge, we propose a novel learning-based control approach consisting of model learning and model predictive control (MPC) utilizing an adaptive frequency scheme. Compared to existing MPC techniques, we learn a model directly from experiments, accounting not only for leg dynamics but also for modeling errors and unknown dynamics mismatch in hardware and during contact. Additionally, learning the model with adaptive frequency allows us to cover the entire flight phase and final jumping target, enhancing the prediction accuracy of the jumping trajectory. Using the learned model, we also design an adaptive-frequency MPC to effectively leverage different jumping phases and track the target accurately. In hardware experiments with a Unitree A1 robot, we demonstrate that our approach outperforms baseline MPC using a nominal model, reducing the jumping distance error up to 8 times. We achieve jumping distance errors of less than 3 percent during continuous jumping on uneven terrain with randomly-placed perturbations of random heights (up to 4 cm or 27 percent of the robot's standing height). Our approach obtains distance errors of 1-2 cm on 34 single and continuous jumps with different jumping targets and model uncertainties.