 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Algorithm and Platform Selection for Visual Detection and Tracking
Paper and Code
May 21, 2016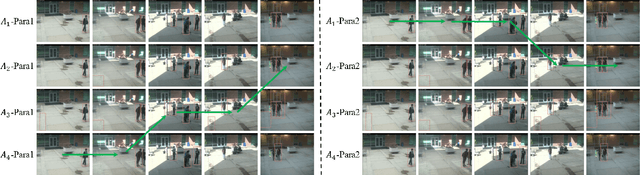
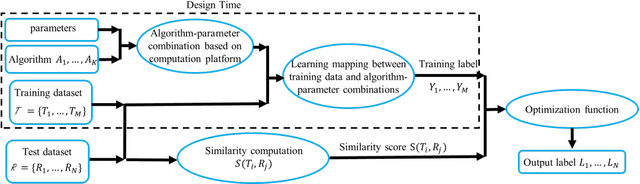

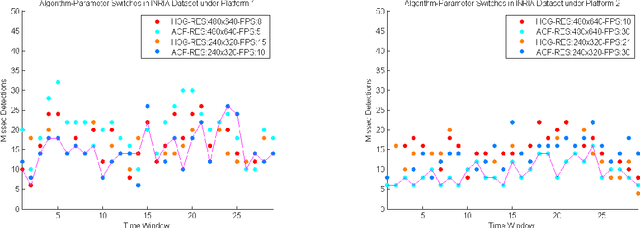
Computer vision algorithms are known to be extremely sensitive to the environmental conditions in which the data is captured, e.g., lighting conditions and target density. Tuning of parameters or choosing a completely new algorithm is often needed to achieve a certain performance level, especially when there is a limitation of the computation source. In this paper, we focus on this problem and propose a framework to adaptively select the "best" algorithm-parameter combination and the computation platform under performance and cost constraints at design time, and adapt the algorithms at runtime based on real-time inputs. This necessitates developing a mechanism to switch between different algorithms as the nature of the input video changes. Our proposed algorithm calculates a similarity function between a test video scenario and each training scenario, where the similarity calculation is based on learning a manifold of image features that is shared by both the training and test datasets. Similarity between training and test dataset indicates the same algorithm can be applied to both of them and achieve similar performance. We design a cost function with this similarity measure to find the most similar training scenario to the test data. The "best" algorithm under a given platform is obtained by selecting the algorithm with a specific parameter combination that performs the best on the corresponding training data. The proposed framework can be used first offline to choose the platform based on performance and cost constraints, and then online whereby the "best" algorithm is selected for each new incoming video segment for a given platform. In the experiments, we apply our algorithm to the problems of pedestrian detection and tracking. We show how to adaptively select platforms and algorithm-parameter combinations. Our results provide optimal performance on 3 publicly available datasets.