 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptable Deformable Convolutions for Semantic Segmentation of Fisheye Images in Autonomous Driving Systems
Paper and Code
Feb 19, 2021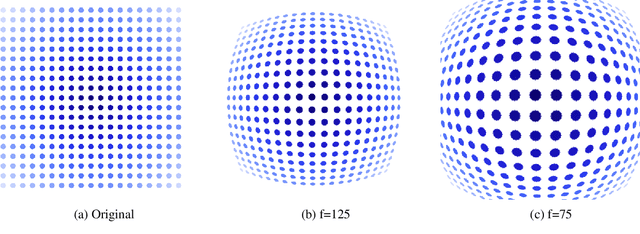
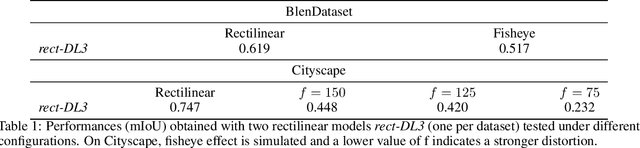


Advanced Driver-Assistance Systems rely heavily on perception tasks such as semantic segmentation where images are captured from large field of view (FoV) cameras. State-of-the-art works have made considerable progress toward applying Convolutional Neural Network (CNN) to standard (rectilinear) images. However, the large FoV cameras used in autonomous vehicles produce fisheye images characterized by strong geometric distortion. This work demonstrates that a CNN trained on standard images can be readily adapted to fisheye images, which is crucial in real-world applications where time-consuming real-time data transformation must be avoided. Our adaptation protocol mainly relies on modifying the support of the convolutions by using their deformable equivalents on top of pre-existing layers. We prove that tuning an optimal support only requires a limited amount of labeled fisheye images, as a small number of training samples is sufficient to significantly improve an existing model's performance on wide-angle images. Furthermore, we show that finetuning the weights of the network is not necessary to achieve high performance once the deformable components are learned. Finally, we provide an in-depth analysis of the effect of the deformable convolutions, bringing elements of discussion on the behavior of CNN models.