 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActivating Self-Attention for Multi-Scene Absolute Pose Regression
Paper and Code
Nov 03, 2024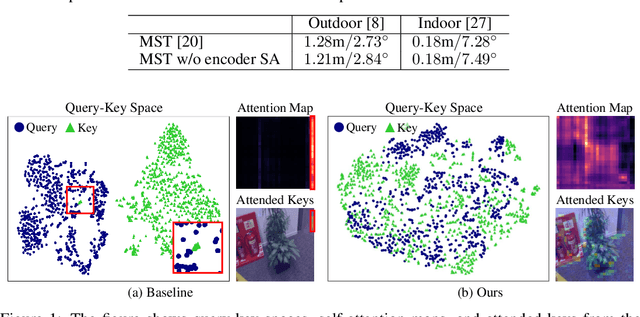
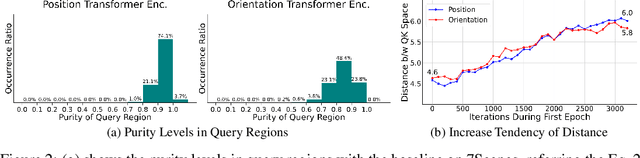

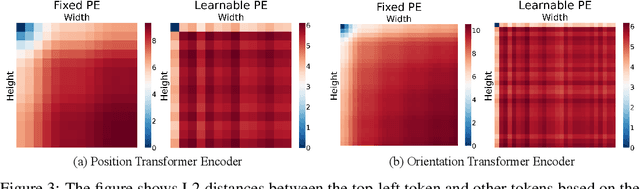
Multi-scene absolute pose regression addresses the demand for fast and memory-efficient camera pose estimation across various real-world environments. Nowadays, transformer-based model has been devised to regress the camera pose directly in multi-scenes. Despite its potential, transformer encoders are underutilized due to the collapsed self-attention map, having low representation capacity. This work highlights the problem and investigates it from a new perspective: distortion of query-key embedding space. Based on the statistical analysis, we reveal that queries and keys are mapped in completely different spaces while only a few keys are blended into the query region. This leads to the collapse of the self-attention map as all queries are considered similar to those few keys. Therefore, we propose simple but effective solutions to activate self-attention. Concretely, we present an auxiliary loss that aligns queries and keys, preventing the distortion of query-key space and encouraging the model to find global relations by self-attention. In addition, the fixed sinusoidal positional encoding is adopted instead of undertrained learnable one to reflect appropriate positional clues into the inputs of self-attention. As a result, our approach resolves the aforementioned problem effectively, thus outperforming existing methods in both outdoor and indoor scenes.