 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAction Planning for Packing Long Linear Elastic Objects into Compact Boxes with Bimanual Robotic Manipulation
Paper and Code
Oct 22, 2021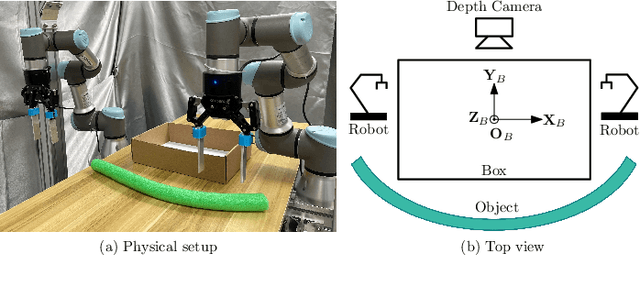
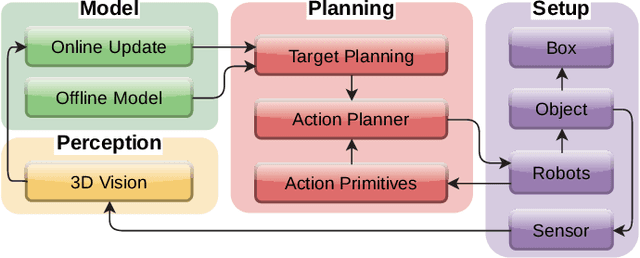
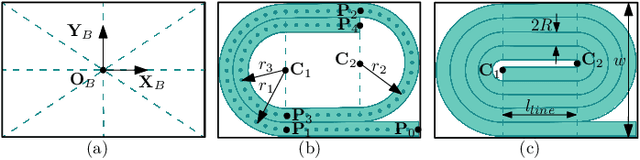

Automatic packing of objects is a critical component for efficient shipping in the Industry 4.0 era. Although robots have shown great success in pick-and-place operations with rigid products, the autonomous shaping and packing of elastic materials into compact boxes remains one of the most challenging problems in robotics; The automation of packing tasks is crucial at this moment given the accelerating shift towards e-commerce (which requires to manipulate multiple types of materials). In this paper, we propose a new action planning approach to automatically pack long linear elastic objects into common-size boxes with a bimanual robotic system. For that, we developed an efficient vision-based method to compute the objects' geometry and track its deformation in real-time and without special markers; The algorithm filters and orders the feedback point cloud that is captured by a depth sensor. A reference object model is introduced to plan the manipulation targets and to complete occluded parts of the object. Action primitives are used to construct high-level behaviors, which enable the execution of all packing steps. To validate the proposed theory, we conduct a detailed experimental study with multiple types and lengths of objects and packing boxes. The proposed methodology is original and its demonstrated manipulation capabilities have not (to the best of the authors knowledge) been previously reported in the literature.