 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate outdoor ground truth based on total stations
Paper and Code
Apr 29, 2021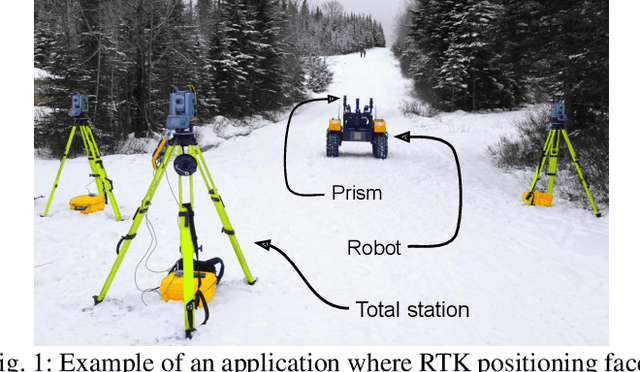
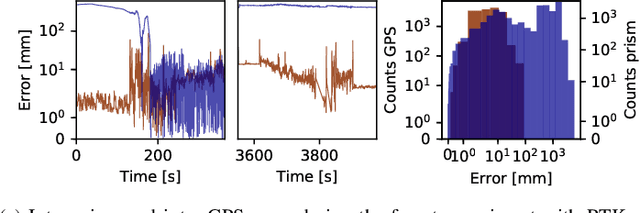
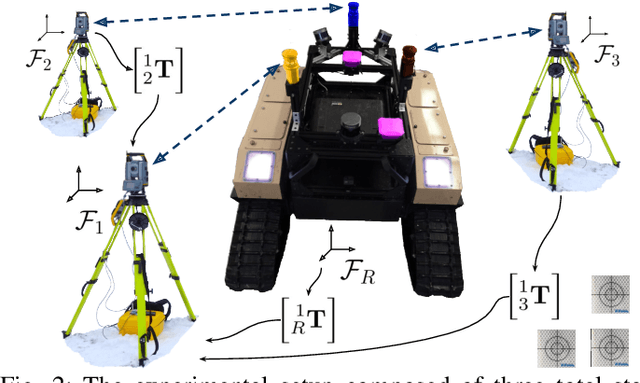
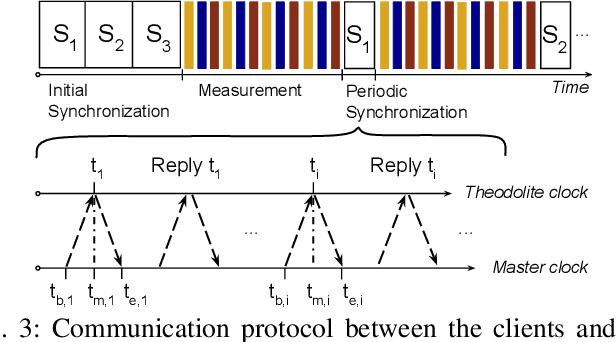
In robotics, accurate ground-truth position fostered the development of mapping and localization algorithms through the creation of cornerstone datasets. In outdoor environments and over long distances, total stations are the most accurate and precise measurement instruments for this purpose. Most total station-based systems in the literature are limited to three Degrees Of Freedoms (DOFs), due to the use of a single-prism tracking approach. In this paper, we present preliminary work on measuring a full pose of a vehicle, bringing the referencing system to six DOFs. Three total stations are used to track in real time three prisms attached to a target platform. We describe the structure of the referencing system and the protocol for acquiring the ground truth with this system. We evaluated its precision in a variety of different outdoor environments, ranging from open-sky to forest trails, and compare this system with another popular source of reference position, the Real Time Kinematics (RTK) positioning solution. Results show that our approach is the most precise, reaching an average positional error of 10 mm and 0.6 deg. This difference in performance was particularly stark in environments where Global Navigation Satellite System (GNSS) signals can be weaker due to overreaching vegetation.