 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Multi-UAV Collaborative Sensing Data Collection: A Hybrid TDMA-NOMA-Cooperative Transmission in Cell-Free MIMO Networks
Paper and Code
Nov 04, 2024
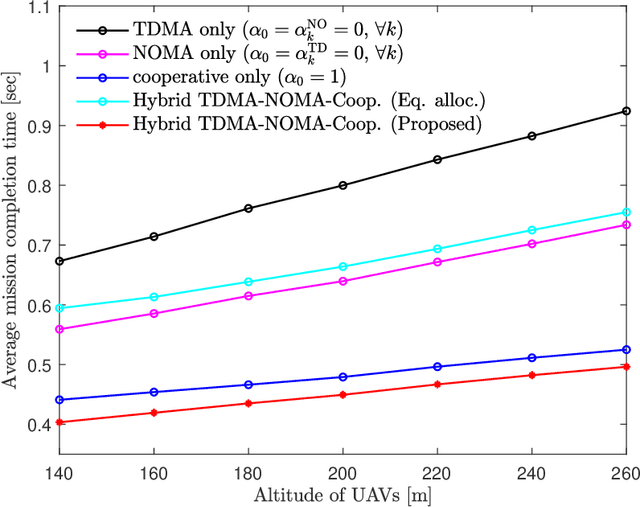


This work investigates a collaborative sensing and data collection system in which multiple unmanned aerial vehicles (UAVs) sense an area of interest and transmit images to a cloud server (CS) for processing. To accelerate the completion of sensing missions, including data transmission, the sensing task is divided into individual private sensing tasks for each UAV and a common sensing task that is executed by all UAVs to enable cooperative transmission. Unlike existing studies, we explore the use of an advanced cell-free multiple-input multiple-output (MIMO) network, which effectively manages inter-UAV interference. To further optimize wireless channel utilization, we propose a hybrid transmission strategy that combines time-division multiple access (TDMA), non-orthogonal multiple access (NOMA), and cooperative transmission. The problem of jointly optimizing task splitting ratios and the hybrid TDMA-NOMA-cooperative transmission strategy is formulated with the objective of minimizing mission completion time. Extensive numerical results demonstrate the effectiveness of the proposed task allocation and hybrid transmission scheme in accelerating the completion of sensing missions.