 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Multi-Agent Planning Using Graph Transformers with Bounded Suboptimality
Paper and Code
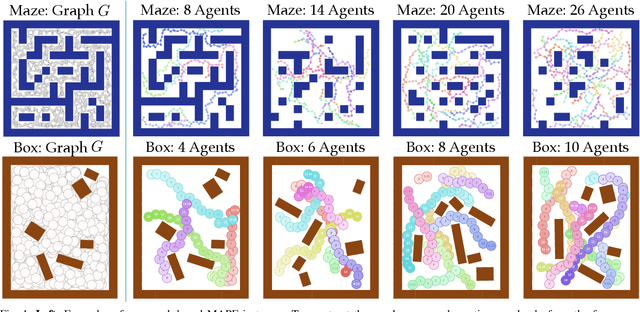
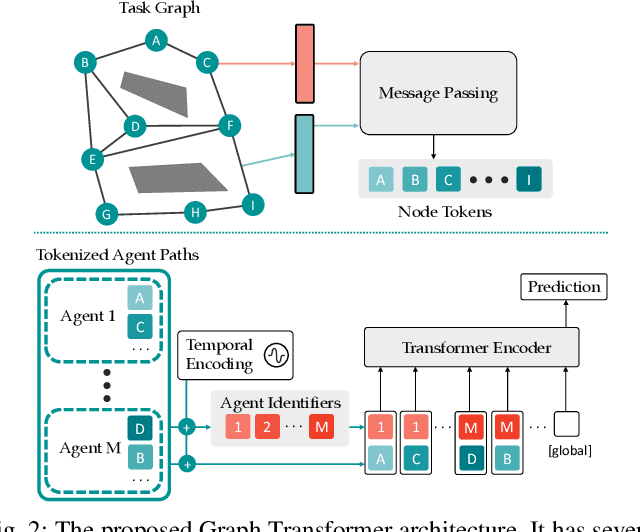
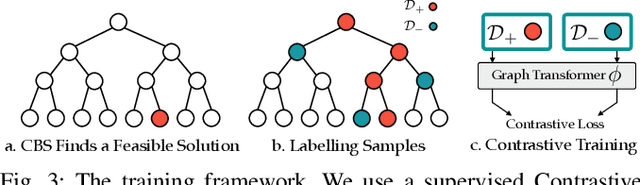
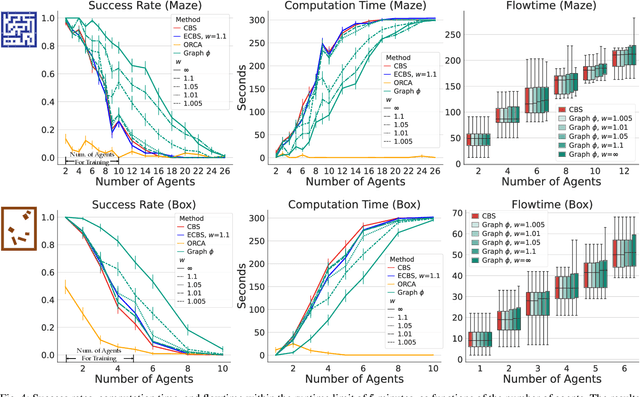
Conflict-Based Search is one of the most popular methods for multi-agent path finding. Though it is complete and optimal, it does not scale well. Recent works have been proposed to accelerate it by introducing various heuristics. However, whether these heuristics can apply to non-grid-based problem settings while maintaining their effectiveness remains an open question. In this work, we find that the answer is prone to be no. To this end, we propose a learning-based component, i.e., the Graph Transformer, as a heuristic function to accelerate the planning. The proposed method is provably complete and bounded-suboptimal with any desired factor. We conduct extensive experiments on two environments with dense graphs. Results show that the proposed Graph Transformer can be trained in problem instances with relatively few agents and generalizes well to a larger number of agents, while achieving better performance than state-of-the-art methods.