 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Wide-area, Low-latency, and Power-efficient 6-DoF Pose Tracking System for Rigid Objects
Paper and Code
Sep 15, 2021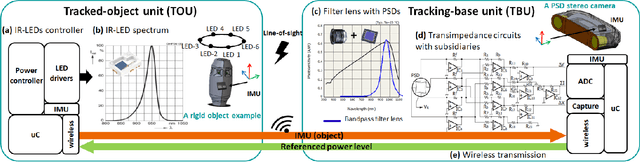
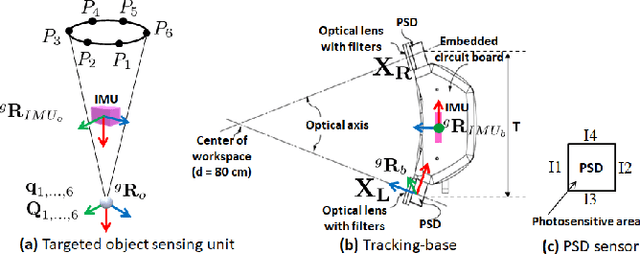
Position sensitive detectors (PSDs) offer possibility to track single active marker's two (or three) degrees of freedom (DoF) position with a high accuracy, while having a fast response time with high update frequency and low latency, all using a very simple signal processing circuit. However they are not particularly suitable for 6-DoF object pose tracking system due to lack of orientation measurement, limited tracking range, and sensitivity to environmental variation. We propose a novel 6-DoF pose tracking system for a rigid object tracking requiring a single active marker. The proposed system uses a stereo-based PSD pair and multiple Inertial Measurement Units (IMUs). This is done based on a practical approach to identify and control the power of Infrared-Light Emitting Diode (IR-LED) active markers, with an aim to increase the tracking work space and reduce the power consumption. Our proposed tracking system is validated with three different work space sizes and for static and dynamic positional accuracy using robotic arm manipulator with three different dynamic motion patterns. The results show that the static position root-mean-square (RMS) error is 0.6mm. The dynamic position RMS error is 0.7-0.9mm. The orientation RMS error is between 0.04 and 0.9 degree at varied dynamic motion. Overall, our proposed tracking system is capable of tracking a rigid object pose with sub-millimeter accuracy at the mid range of the work space and sub-degree accuracy for all work space under a lab setting.