 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Walk with SGD
Paper and Code
May 30, 2018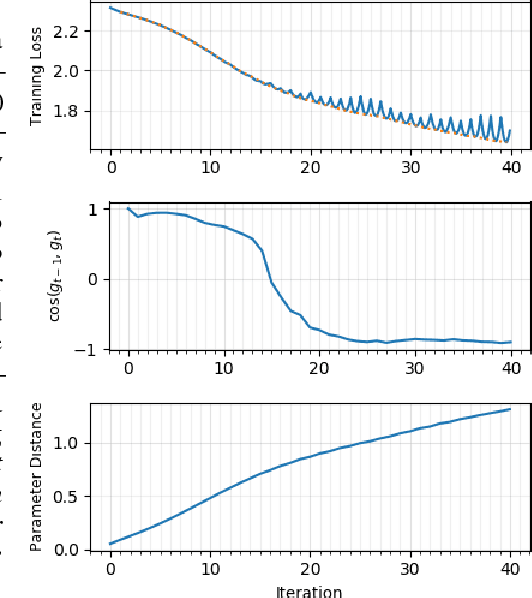
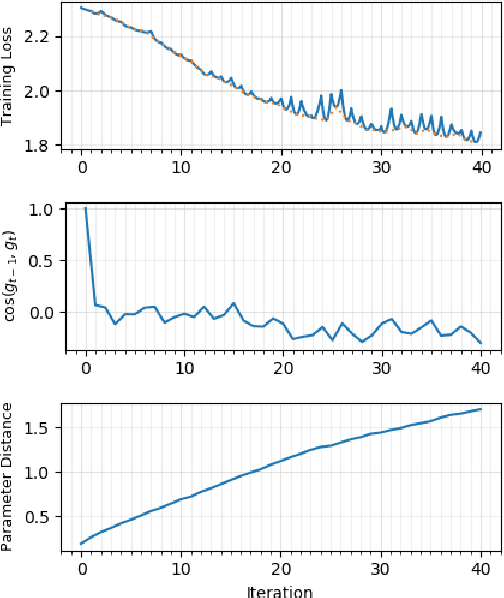
We present novel empirical observations regarding how stochastic gradient descent (SGD) navigates the loss landscape of over-parametrized deep neural networks (DNNs). These observations expose the qualitatively different roles of learning rate and batch-size in DNN optimization and generalization. Specifically we study the DNN loss surface along the trajectory of SGD by interpolating the loss surface between parameters from consecutive \textit{iterations} and tracking various metrics during training. We find that the loss interpolation between parameters before and after each training iteration's update is roughly convex with a minimum (\textit{valley floor}) in between for most of the training. Based on this and other metrics, we deduce that for most of the training update steps, SGD moves in valley like regions of the loss surface by jumping from one valley wall to another at a height above the valley floor. This 'bouncing between walls at a height' mechanism helps SGD traverse larger distance for small batch sizes and large learning rates which we find play qualitatively different roles in the dynamics. While a large learning rate maintains a large height from the valley floor, a small batch size injects noise facilitating exploration. We find this mechanism is crucial for generalization because the valley floor has barriers and this exploration above the valley floor allows SGD to quickly travel far away from the initialization point (without being affected by barriers) and find flatter regions, corresponding to better generalization.