 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA system of vision sensor based deep neural networks for complex driving scene analysis in support of crash risk assessment and prevention
Paper and Code
Jun 18, 2021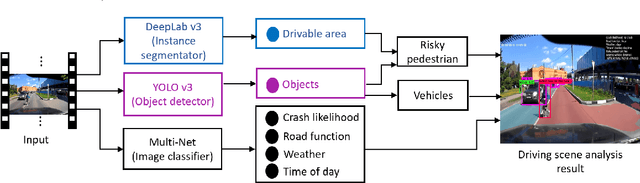


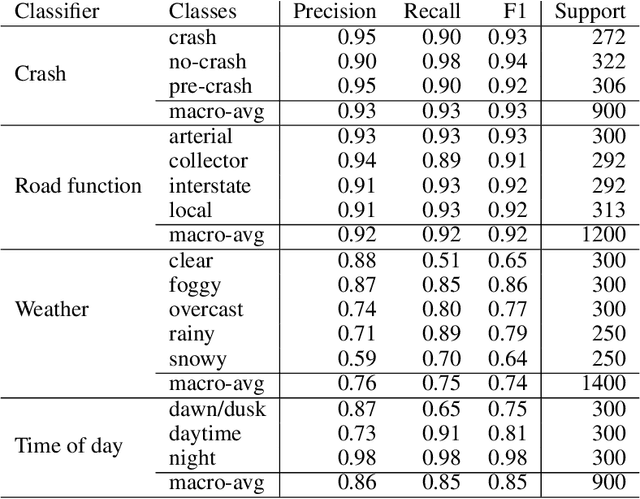
To assist human drivers and autonomous vehicles in assessing crash risks, driving scene analysis using dash cameras on vehicles and deep learning algorithms is of paramount importance. Although these technologies are increasingly available, driving scene analysis for this purpose still remains a challenge. This is mainly due to the lack of annotated large image datasets for analyzing crash risk indicators and crash likelihood, and the lack of an effective method to extract lots of required information from complex driving scenes. To fill the gap, this paper develops a scene analysis system. The Multi-Net of the system includes two multi-task neural networks that perform scene classification to provide four labels for each scene. The DeepLab v3 and YOLO v3 are combined by the system to detect and locate risky pedestrians and the nearest vehicles. All identified information can provide the situational awareness to autonomous vehicles or human drivers for identifying crash risks from the surrounding traffic. To address the scarcity of annotated image datasets for studying traffic crashes, two completely new datasets have been developed by this paper and made available to the public, which were proved to be effective in training the proposed deep neural networks. The paper further evaluates the performance of the Multi-Net and the efficiency of the developed system. Comprehensive scene analysis is further illustrated with representative examples. Results demonstrate the effectiveness of the developed system and datasets for driving scene analysis, and their supportiveness for crash risk assessment and crash prevention.