 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Algorithms for Black-Box Safety Validation
Paper and Code
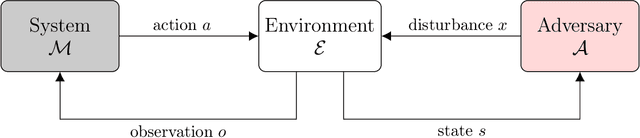
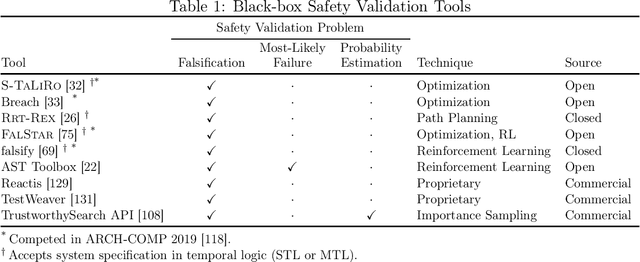
Autonomous and semi-autonomous systems for safety-critical applications require rigorous testing before deployment. Due to the complexity of these systems, formal verification may be impossible and real-world testing may be dangerous during development. Therefore, simulation-based techniques have been developed that treat the system under test as a black box during testing. Safety validation tasks include finding disturbances to the system that cause it to fail (falsification), finding the most-likely failure, and estimating the probability that the system fails. Motivated by the prevalence of safety-critical artificial intelligence, this work provides a survey of state-of-the-art safety validation techniques with a focus on applied algorithms and their modifications for the safety validation problem. We present and discuss algorithms in the domains of optimization, path planning, reinforcement learning, and importance sampling. Problem decomposition techniques are presented to help scale algorithms to large state spaces, and a brief overview of safety-critical applications is given, including autonomous vehicles and aircraft collision avoidance systems. Finally, we present a survey of existing academic and commercially available safety validation tools.