 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Specific Task-oriented Semantic Image Communication System for substation patrol inspection
Paper and Code
Jan 09, 2023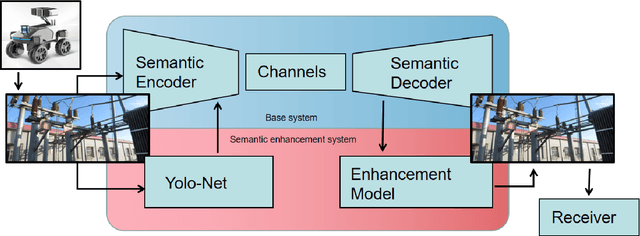
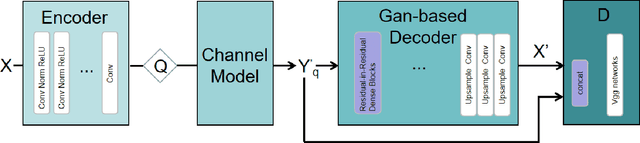
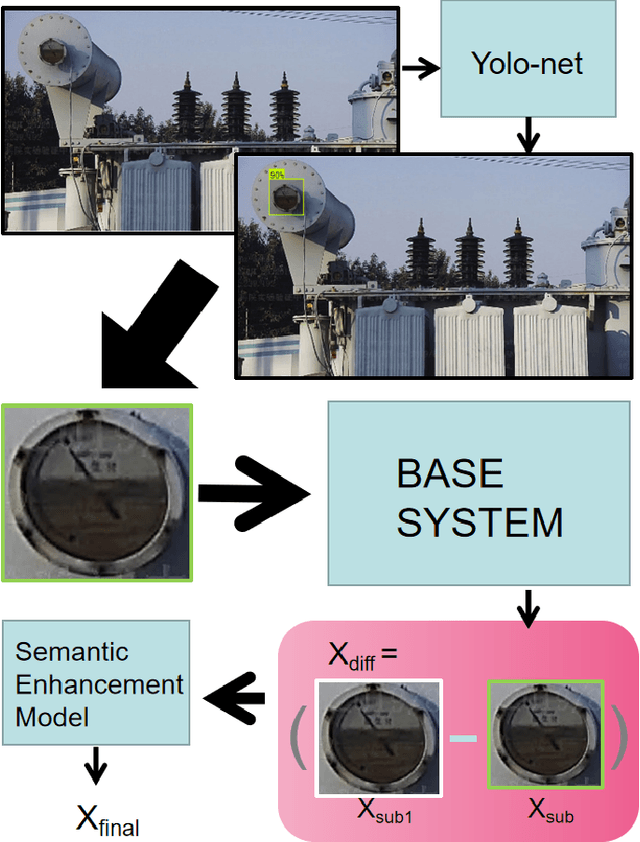
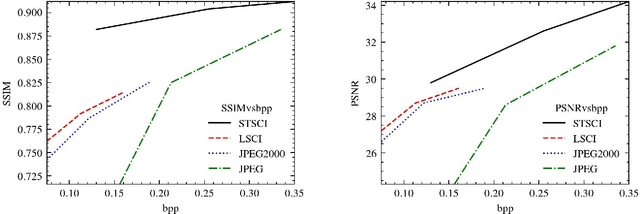
Intelligent inspection robots are widely used in substation patrol inspection, which can help check potential safety hazards by patrolling the substation and sending back scene images. However, when patrolling some marginal areas with weak signal, the scene images cannot be sucessfully transmissted to be used for hidden danger elimination, which greatly reduces the quality of robots'daily work. To solve such problem, a Specific Task-oriented Semantic Communication System for Imag-STSCI is designed, which involves the semantic features extraction, transmission, restoration and enhancement to get clearer images sent by intelligent robots under weak signals. Inspired by that only some specific details of the image are needed in such substation patrol inspection task, we proposed a new paradigm of semantic enhancement in such specific task to ensure the clarity of key semantic information when facing a lower bit rate or a low signal-to-noise ratio situation. Across the reality-based simulation, experiments show our STSCI can generally surpass traditional image-compression-based and channel-codingbased or other semantic communication system in the substation patrol inspection task with a lower bit rate even under a low signal-to-noise ratio situation.