 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Spatiotemporal Hand-Eye Calibration for Trajectory Alignment in Visual(-Inertial) Odometry Evaluation
Paper and Code
Apr 23, 2024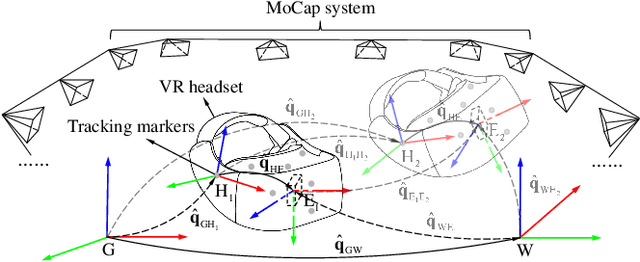
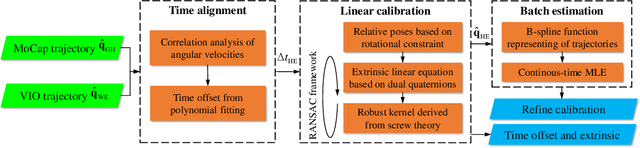
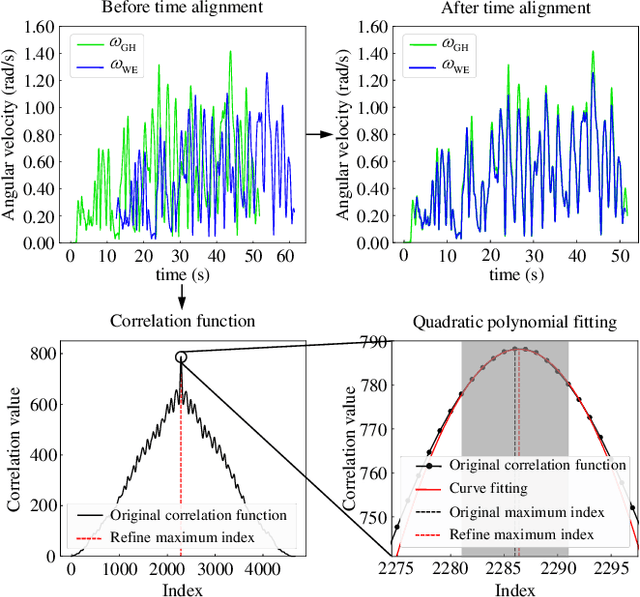

A common prerequisite for evaluating a visual(-inertial) odometry (VO/VIO) algorithm is to align the timestamps and the reference frame of its estimated trajectory with a reference ground-truth derived from a system of superior precision, such as a motion capture system. The trajectory-based alignment, typically modeled as a classic hand-eye calibration, significantly influences the accuracy of evaluation metrics. However, traditional calibration methods are susceptible to the quality of the input poses. Few studies have taken this into account when evaluating VO/VIO trajectories that usually suffer from noise and drift. To fill this gap, we propose a novel spatiotemporal hand-eye calibration algorithm that fully leverages multiple constraints from screw theory for enhanced accuracy and robustness. Experimental results show that our algorithm has better performance and is less noise-prone than state-of-the-art methods.