 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simulation Study of Passing Drivers' Responses to the Automated Truck-Mounted Attenuator System in Road Maintenance
Paper and Code
Aug 01, 2022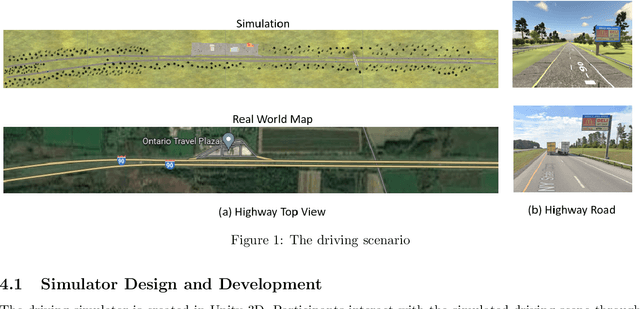
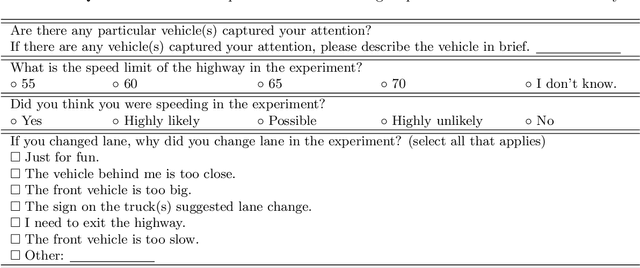
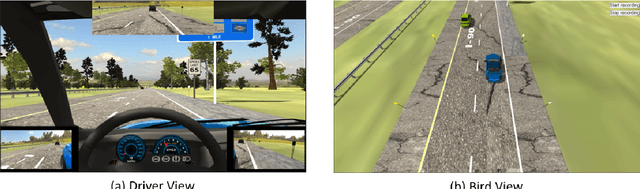

The Autonomous Truck-Mounted Attenuator (ATMA) system is a lead-follower vehicle system based on autonomous driving and connected vehicle technologies. The lead truck performs maintenance tasks on the road, and the unmanned follower truck is designed to improve the visibility of the moving work zone to passing vehicles and to protect workers and equipment. While the ATMA has been under testing by transportation maintenance and operations agencies in recent years, a simulator-based testing capability is a supplement, especially if human subjects are involved. This paper aims to discover how passing drivers perceive, understand, and react to the ATMA system in road maintenance accordingly. A driving simulator for ATMA studies is developed for collecting the driving data. Then, driving simulation experiments were performed, wherein a screen-based eye tracker collected sixteen subjects' gaze points and pupil diameters. Data analysis has evidenced the changes in the visual attention pattern of subjects when they were passing the ATMA. On average, the ATMA starts to attract subjects' attention from 500 ft behind the follower truck. Most (87.50%) understood the follower truck's protection purpose, and the majority (86.67%) reasoned the association between the two trucks. But still, many (43.75%) did not recognize that ATMA is a connected autonomous vehicle system. While all subjects safely changed lanes and attempted to pass the slow-moving ATMA, their inadequate understanding of ATMA is a potential risk, like cutting into the ATAM. Results implied that transportation maintenance and operations agencies should take this into consideration in establishing the deployment guidance.