 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sensor Fusion-based GNSS Spoofing Attack Detection Framework for Autonomous Vehicles
Paper and Code
Aug 19, 2021
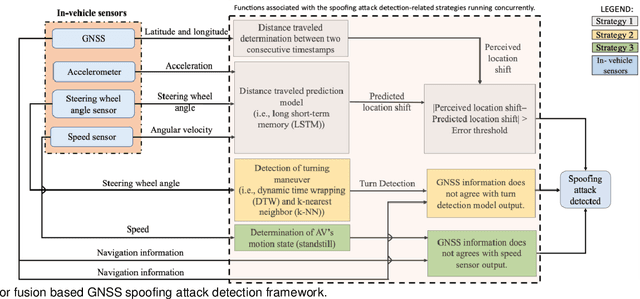
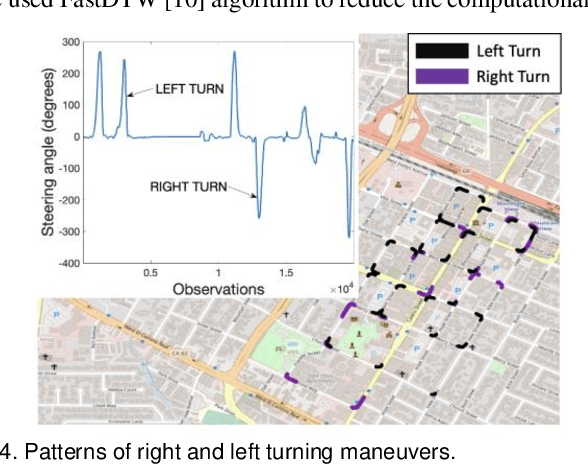
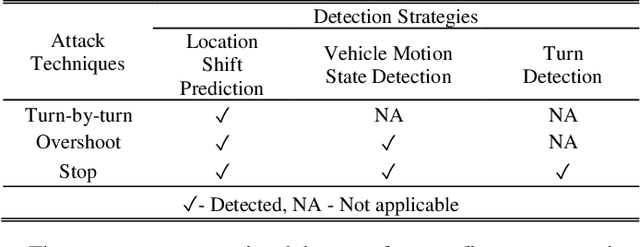
This paper presents a sensor fusion based Global Navigation Satellite System (GNSS) spoofing attack detection framework for autonomous vehicles (AV) that consists of two concurrent strategies: (i) detection of vehicle state using predicted location shift -- i.e., distance traveled between two consecutive timestamps -- and monitoring of vehicle motion state -- i.e., standstill/ in motion; and (ii) detection and classification of turns (i.e., left or right). Data from multiple low-cost in-vehicle sensors (i.e., accelerometer, steering angle sensor, speed sensor, and GNSS) are fused and fed into a recurrent neural network model, which is a long short-term memory (LSTM) network for predicting the location shift, i.e., the distance that an AV travels between two consecutive timestamps. This location shift is then compared with the GNSS-based location shift to detect an attack. We have then combined k-Nearest Neighbors (k-NN) and Dynamic Time Warping (DTW) algorithms to detect and classify left and right turns using data from the steering angle sensor. To prove the efficacy of the sensor fusion-based attack detection framework, attack datasets are created for four unique and sophisticated spoofing attacks-turn-by-turn, overshoot, wrong turn, and stop, using the publicly available real-world Honda Research Institute Driving Dataset (HDD). Our analysis reveals that the sensor fusion-based detection framework successfully detects all four types of spoofing attacks within the required computational latency threshold.