Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Scooter-Mounted Robot Arm to Assist with Activities of Daily Life
Paper and Code
Sep 25, 2018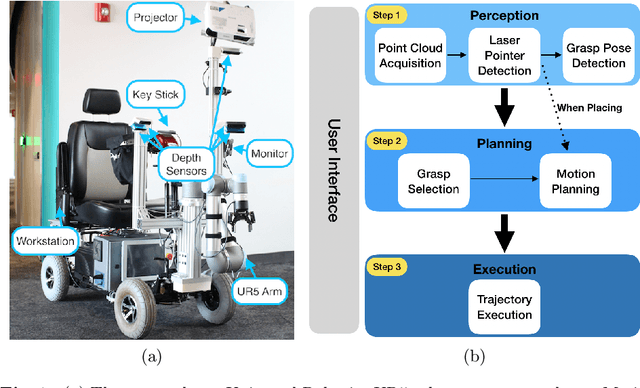
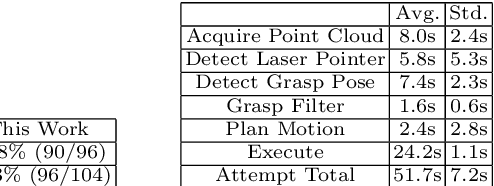
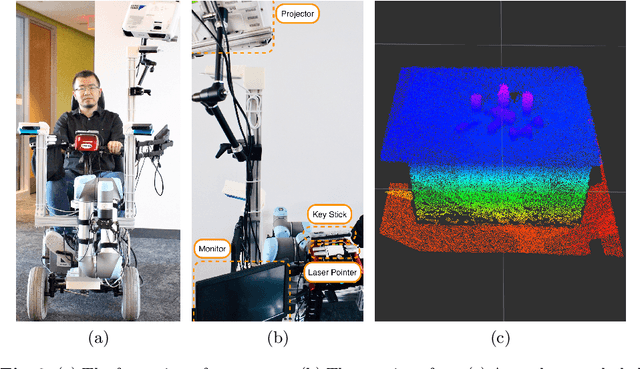

Many people with motor disabilities struggle with activities of daily life (ADLs), limiting their ability to live independently. This paper details a robotic mobility scooter developed to assist with manipulation-based ADLs to increase independence. We present a system comprised of a Universal Robotics UR5 robotic arm, a mobility scooter, five depth sensors, and a user interface which utilizes laser pointers. The system provides pick-and-drop and pick-and-place functionality in open world environments without modeling the objects or environment. We evaluate our system over several experimental scenarios and show an improvement relative to a baseline established for a similar system.
* 7 pages, 6 figures, submitted to IEEE International Conference on
Robotics and Automation (ICRA) 2019
View paper on