 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Rotation Invariant Latent Factor Model for Moveme Discovery from Static Poses
Paper and Code
Sep 23, 2016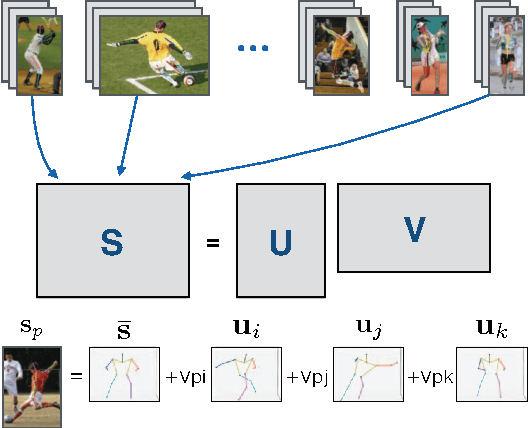
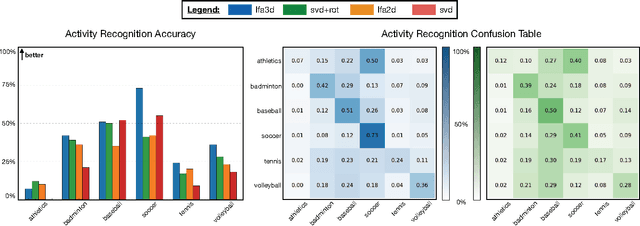
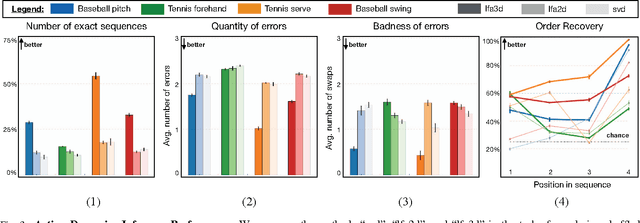
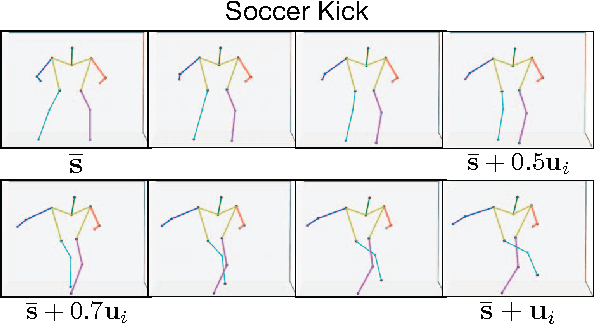
We tackle the problem of learning a rotation invariant latent factor model when the training data is comprised of lower-dimensional projections of the original feature space. The main goal is the discovery of a set of 3-D bases poses that can characterize the manifold of primitive human motions, or movemes, from a training set of 2-D projected poses obtained from still images taken at various camera angles. The proposed technique for basis discovery is data-driven rather than hand-designed. The learned representation is rotation invariant, and can reconstruct any training instance from multiple viewing angles. We apply our method to modeling human poses in sports (via the Leeds Sports Dataset), and demonstrate the effectiveness of the learned bases in a range of applications such as activity classification, inference of dynamics from a single frame, and synthetic representation of movements.