 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Pedestrian Detection Approach for Autonomous Vehicles
Paper and Code
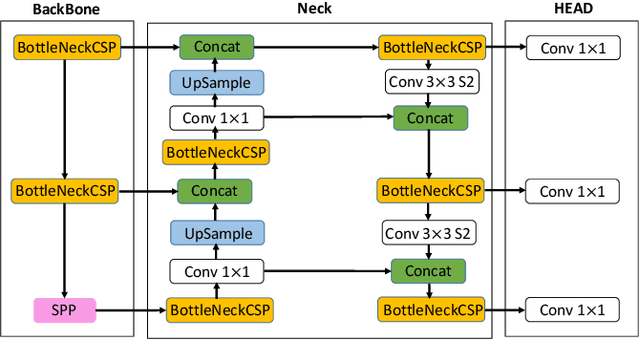
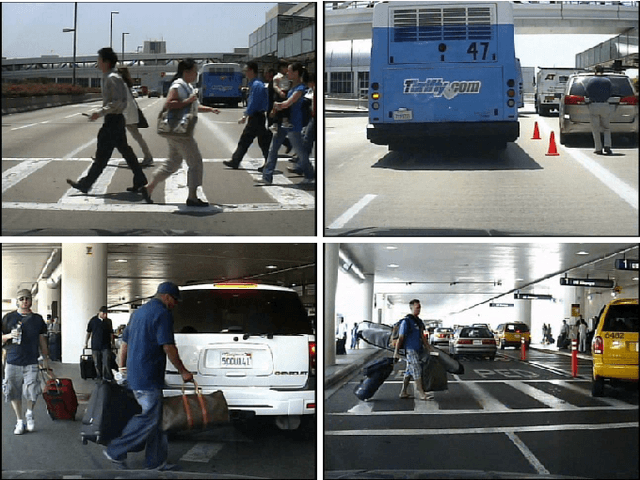
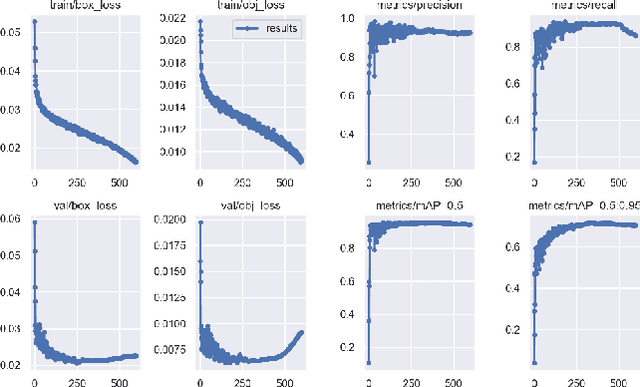
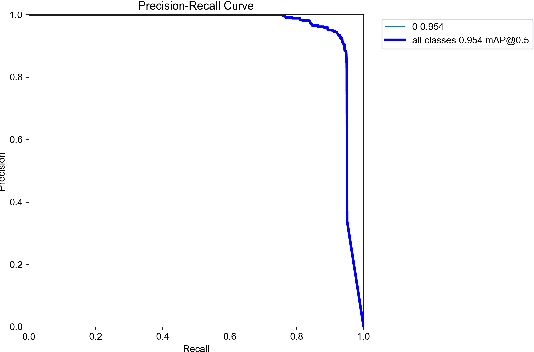
Nowadays, utilizing Advanced Driver-Assistance Systems (ADAS) has absorbed a huge interest as a potential solution for reducing road traffic issues. Despite recent technological advances in such systems, there are still many inquiries that need to be overcome. For instance, ADAS requires accurate and real-time detection of pedestrians in various driving scenarios. To solve the mentioned problem, this paper aims to fine-tune the YOLOv5s framework for handling pedestrian detection challenges on the real-world instances of Caltech pedestrian dataset. We also introduce a developed toolbox for preparing training and test data and annotations of Caltech pedestrian dataset into the format recognizable by YOLOv5. Experimental results of utilizing our approach show that the mean Average Precision (mAP) of our fine-tuned model for pedestrian detection task is more than 91 percent when performing at the highest rate of 70 FPS. Moreover, the experiments on the Caltech pedestrian dataset samples have verified that our proposed approach is an effective and accurate method for pedestrian detection and can outperform other existing methodologies.