 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Probabilistic Graphical Model Approach to the Structure-and-Motion Problem
Paper and Code
Oct 07, 2021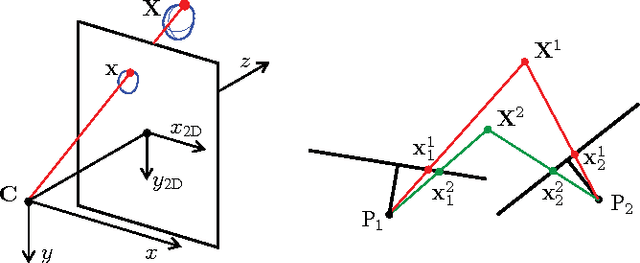
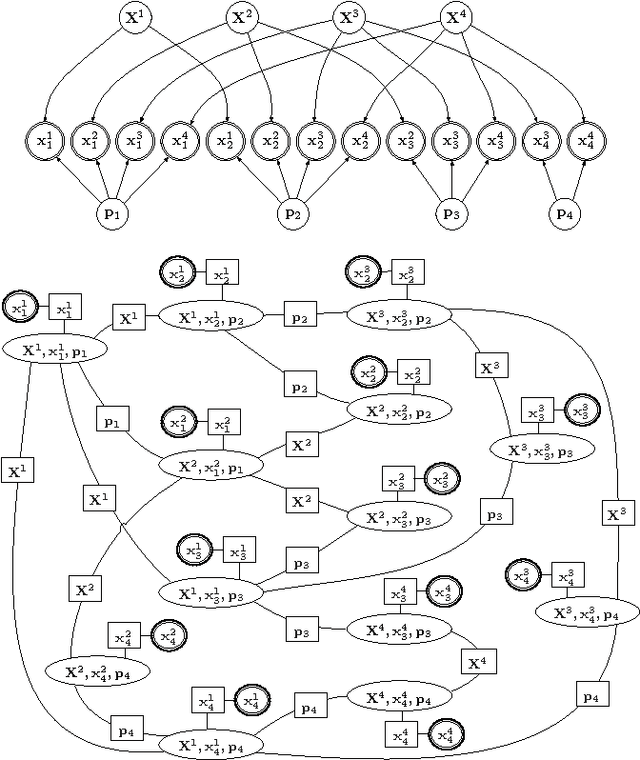
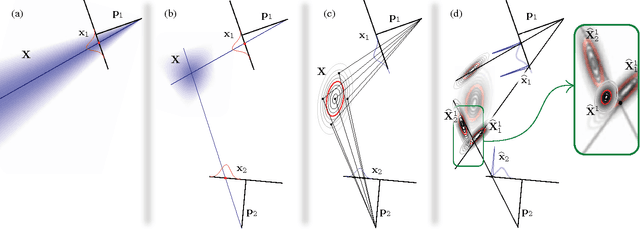
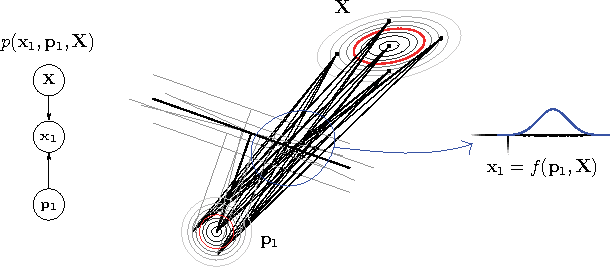
We present a means of formulating and solving the well known structure-and-motion problem in computer vision with probabilistic graphical models. We model the unknown camera poses and 3D feature coordinates as well as the observed 2D projections as Gaussian random variables, using sigma point parameterizations to effectively linearize the nonlinear relationships between these variables. Those variables involved in every projection are grouped into a cluster, and we connect the clusters in a cluster graph. Loopy belief propagation is performed over this graph, in an iterative re-initialization and estimation procedure, and we find that our approach shows promise in both simulation and on real-world data. The PGM is easily extendable to include additional parameters or constraints.