 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Probabilistic Framework for Learning Kinematic Models of Articulated Objects
Paper and Code
Jan 16, 2014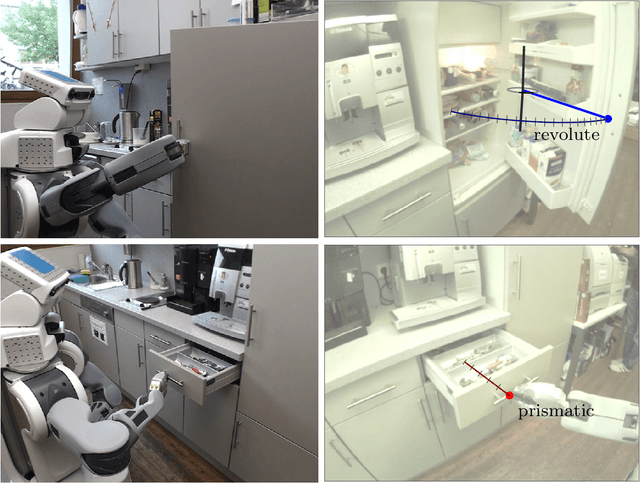
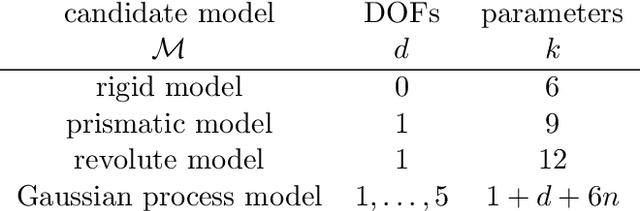

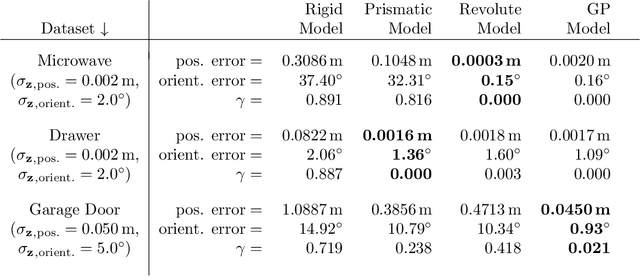
Robots operating in domestic environments generally need to interact with articulated objects, such as doors, cabinets, dishwashers or fridges. In this work, we present a novel, probabilistic framework for modeling articulated objects as kinematic graphs. Vertices in this graph correspond to object parts, while edges between them model their kinematic relationship. In particular, we present a set of parametric and non-parametric edge models and how they can robustly be estimated from noisy pose observations. We furthermore describe how to estimate the kinematic structure and how to use the learned kinematic models for pose prediction and for robotic manipulation tasks. We finally present how the learned models can be generalized to new and previously unseen objects. In various experiments using real robots with different camera systems as well as in simulation, we show that our approach is valid, accurate and efficient. Further, we demonstrate that our approach has a broad set of applications, in particular for the emerging fields of mobile manipulation and service robotics.