 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Physics-Informed Deep Learning Paradigm for Car-Following Models
Paper and Code
Dec 25, 2020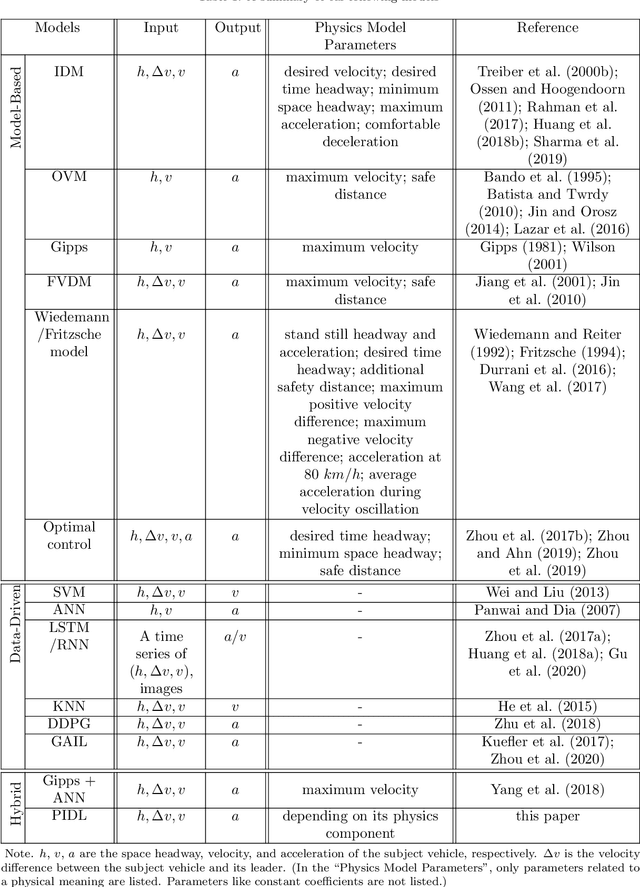



Car-following behavior has been extensively studied using physics-based models, such as the Intelligent Driver Model. These models successfully interpret traffic phenomena observed in the real-world but may not fully capture the complex cognitive process of driving. Deep learning models, on the other hand, have demonstrated their power in capturing observed traffic phenomena but require a large amount of driving data to train. This paper aims to develop a family of neural network based car-following models that are informed by physics-based models, which leverage the advantage of both physics-based (being data-efficient and interpretable) and deep learning based (being generalizable) models. We design physics-informed deep learning for car-following (PIDL-CF) architectures encoded with two popular physics-based models - IDM and OVM, on which acceleration is predicted for four traffic regimes: acceleration, deceleration, cruising, and emergency braking. Two types of PIDL-CFM problems are studied, one to predict acceleration only and the other to jointly predict acceleration and discover model parameters. We also demonstrate the superior performance of PIDL with the Next Generation SIMulation (NGSIM) dataset over baselines, especially when the training data is sparse. The results demonstrate the superior performance of neural networks informed by physics over those without. The developed PIDL-CF framework holds the potential for system identification of driving models and for the development of driving-based controls for automated vehicles.