Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Perceived Environment Design using a Multi-Modal Variational Autoencoder for learning Active-Sensing
Paper and Code
Nov 01, 2019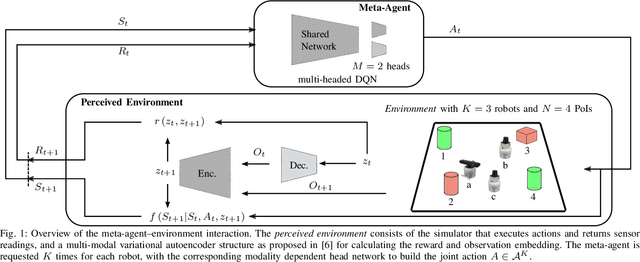
This contribution comprises the interplay between a multi-modal variational autoencoder and an environment to a perceived environment, on which an agent can act. Furthermore, we conclude our work with a comparison to curiosity-driven learning.
* Extended Abstract for the IROS 2019 Workshop on Deep Probabilistic
Generative Models for Cognitive Architecture in Robotics
View paper on