 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Near Sensor Edge Computing System for Point Cloud Semantic Segmentation
Paper and Code
Jul 12, 2022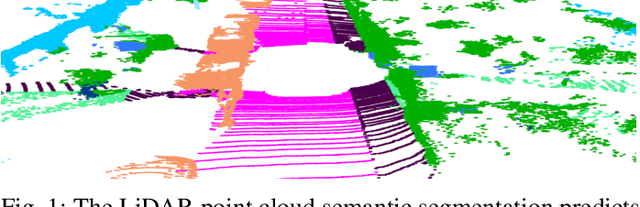
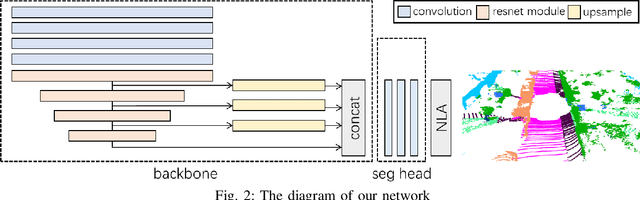
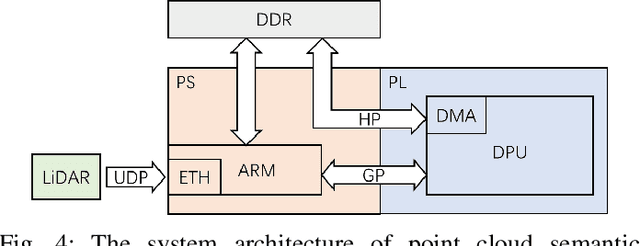
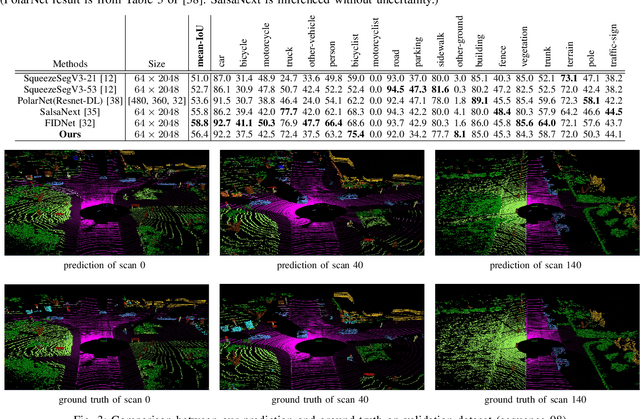
Point cloud semantic segmentation has attracted attentions due to its robustness to light condition. This makes it an ideal semantic solution for autonomous driving. However, considering the large computation burden and bandwidth demanding of neural networks, putting all the computing into vehicle Electronic Control Unit (ECU) is not efficient or practical. In this paper, we proposed a light weighted point cloud semantic segmentation network based on range view. Due to its simple pre-processing and standard convolution, it is efficient when running on deep learning accelerator like DPU. Furthermore, a near sensor computing system is built for autonomous vehicles. In this system, a FPGA-based deep learning accelerator core (DPU) is placed next to the LiDAR sensor, to perform point cloud pre-processing and segmentation neural network. By leaving only the post-processing step to ECU, this solution heavily alleviate the computation burden of ECU and consequently shortens the decision making and vehicles reaction latency. Our semantic segmentation network achieved 10 frame per second (fps) on Xilinx DPU with computation efficiency 42.5 GOP/W.