Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-robot Coverage Path Planning Algorithm Based on Improved DARP Algorithm
Paper and Code
Apr 19, 2023
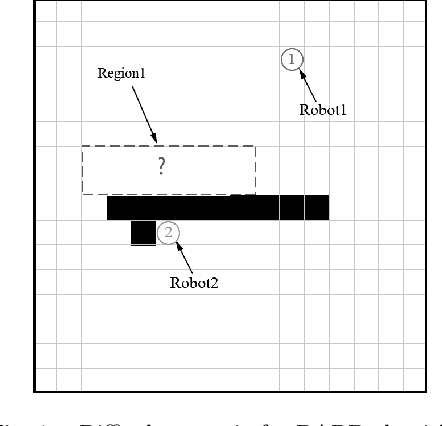

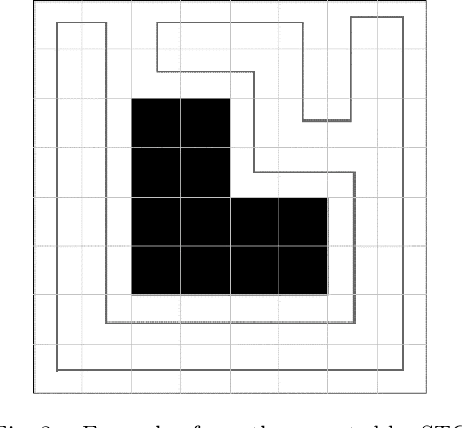
The research on multi-robot coverage path planning (CPP) has been attracting more and more attention. In order to achieve efficient coverage, this paper proposes an improved DARP coverage algorithm. The improved DARP algorithm based on A* algorithm is used to assign tasks to robots and then combined with STC algorithm based on Up-First algorithm to achieve full coverage of the task area. Compared with the initial DARP algorithm, this algorithm has higher efficiency and higher coverage rate.
View paper on