Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Model-Based Approach for Improving Reinforcement Learning Efficiency Leveraging Expert Observations
Paper and Code
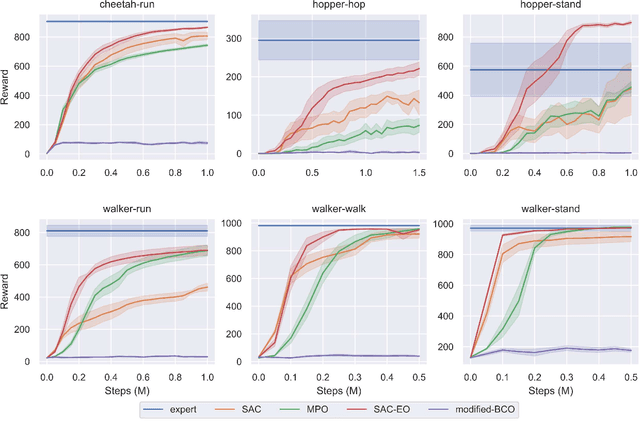
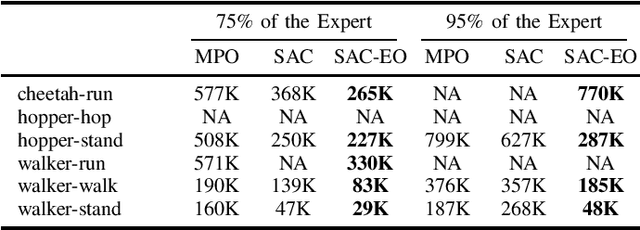
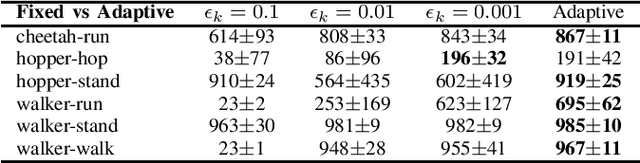
This paper investigates how to incorporate expert observations (without explicit information on expert actions) into a deep reinforcement learning setting to improve sample efficiency. First, we formulate an augmented policy loss combining a maximum entropy reinforcement learning objective with a behavioral cloning loss that leverages a forward dynamics model. Then, we propose an algorithm that automatically adjusts the weights of each component in the augmented loss function. Experiments on a variety of continuous control tasks demonstrate that the proposed algorithm outperforms various benchmarks by effectively utilizing available expert observations.
View paper on