 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Method for Constraint Inference Using Pose and Wrench Measurements
Paper and Code
Oct 29, 2020

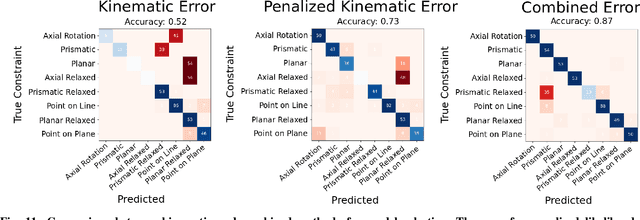

Many physical tasks such as pulling out a drawer or wiping a table can be modeled with geometric constraints. These geometric constraints are characterized by restrictions on kinematic trajectories and reaction wrenches (forces and moments) of objects under the influence of the constraint. This paper presents a method to infer geometric constraints involving unmodeled objects in human demonstrations using both kinematic and wrench measurements. Our approach takes a recording of a human demonstration and determines what constraints are present, when they occur, and their parameters (e.g. positions). By using both kinematic and wrench information, our methods are able to reliably identify a variety of constraint types, even if the constraints only exist for short durations within the demonstration. We present a systematic approach to fitting arbitrary scleronomic constraint models to kinematic and wrench measurements. Reaction forces are estimated from measurements by removing friction. Position, orientation, force, and moment error metrics are developed to provide systematic comparison between constraint models. By conducting a user study, we show that our methods can reliably identify constraints in realistic situations and confirm the value of including forces and moments in the model regression and selection process.