 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Learning System for Motion Planning of Free-Float Dual-Arm Space Manipulator towards Non-Cooperative Object
Paper and Code
Jul 06, 2022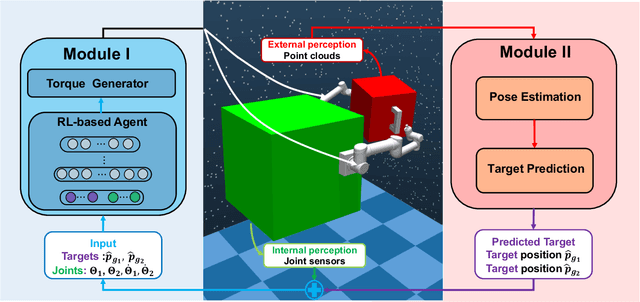
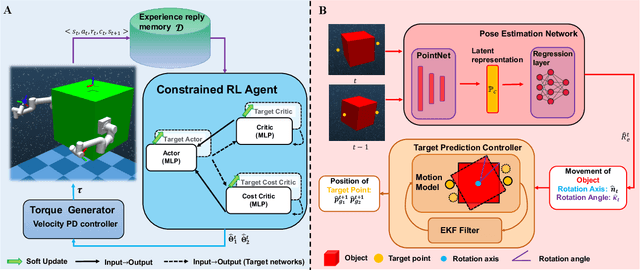
Recent years have seen the emergence of non-cooperative objects in space, like failed satellites and space junk. These objects are usually operated or collected by free-float dual-arm space manipulators. Thanks to eliminating the difficulties of modeling and manual parameter-tuning, reinforcement learning (RL) methods have shown a more promising sign in the trajectory planning of space manipulators. Although previous studies demonstrate their effectiveness, they cannot be applied in tracking dynamic targets with unknown rotation (non-cooperative objects). In this paper, we proposed a learning system for motion planning of free-float dual-arm space manipulator (FFDASM) towards non-cooperative objects. Specifically, our method consists of two modules. Module I realizes the multi-target trajectory planning for two end-effectors within a large target space. Next, Module II takes as input the point clouds of the non-cooperative object to estimate the motional property, and then can predict the position of target points on an non-cooperative object. We leveraged the combination of Module I and Module II to track target points on a spinning object with unknown regularity successfully. Furthermore, the experiments also demonstrate the scalability and generalization of our learning system.