 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Learning-based Variable Size Part Extraction Architecture for 6D Object Pose Recovery in Depth
Paper and Code
Jan 09, 2017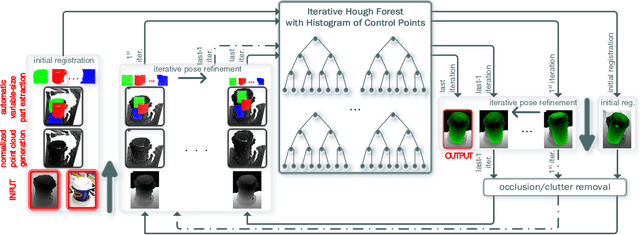
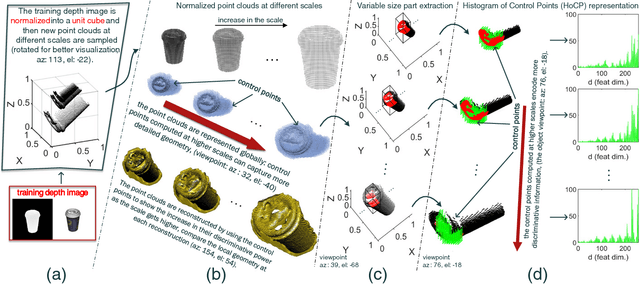
State-of-the-art techniques for 6D object pose recovery depend on occlusion-free point clouds to accurately register objects in 3D space. To deal with this shortcoming, we introduce a novel architecture called Iterative Hough Forest with Histogram of Control Points that is capable of estimating the 6D pose of occluded and cluttered objects given a candidate 2D bounding box. Our Iterative Hough Forest (IHF) is learnt using parts extracted only from the positive samples. These parts are represented with Histogram of Control Points (HoCP), a "scale-variant" implicit volumetric description, which we derive from recently introduced Implicit B-Splines (IBS). The rich discriminative information provided by the scale-variant HoCP features is leveraged during inference. An automatic variable size part extraction framework iteratively refines the object's initial pose that is roughly aligned due to the extraction of coarsest parts, the ones occupying the largest area in image pixels. The iterative refinement is accomplished based on finer (smaller) parts that are represented with more discriminative control point descriptors by using our Iterative Hough Forest. Experiments conducted on a publicly available dataset report that our approach show better registration performance than the state-of-the-art methods.