 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Large-Scale Multi-Institutional Evaluation of Advanced Discrimination Algorithms for Buried Threat Detection in Ground Penetrating Radar
Paper and Code
Jun 07, 2018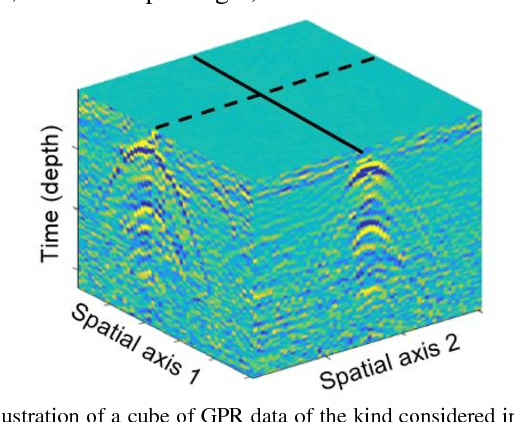

In this paper we consider the development of algorithms for the automatic detection of buried threats using ground penetrating radar (GPR) measurements. GPR is one of the most studied and successful modalities for automatic buried threat detection (BTD), and a large variety of BTD algorithms have been proposed for it. Despite this, large-scale comparisons of GPR-based BTD algorithms are rare in the literature. In this work we report the results of a multi-institutional effort to develop advanced buried threat detection algorithms for a real-world GPR BTD system. The effort involved five institutions with substantial experience with the development of GPR-based BTD algorithms. In this paper we report the technical details of the advanced algorithms submitted by each institution, representing their latest technical advances, and many state-of-the-art GPR-based BTD algorithms. We also report the results of evaluating the algorithms from each institution on the large experimental dataset used for development. The experimental dataset comprised 120,000 m^2 of GPR data using surface area, from 13 different lanes across two US test sites. The data was collected using a vehicle-mounted GPR system, the variants of which have supplied data for numerous publications. Using these results, we identify the most successful and common processing strategies among the submitted algorithms, and make recommendations for GPR-based BTD algorithm design.