 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Systems Model for Simple Manipulation and Self-Manipulation Systems
Paper and Code
Oct 24, 2015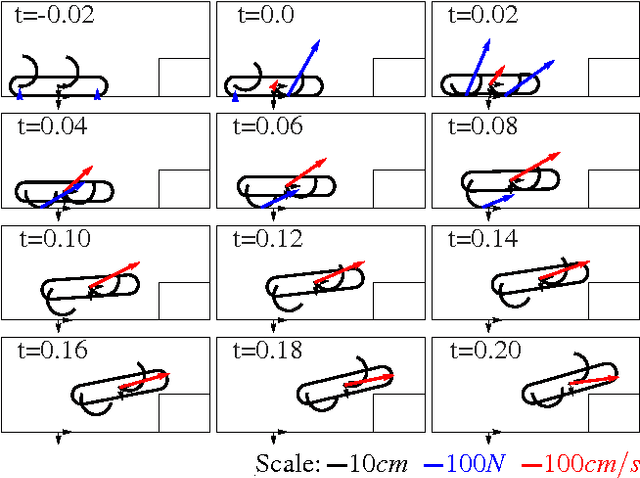

Rigid bodies, plastic impact, persistent contact, Coulomb friction, and massless limbs are ubiquitous simplifications introduced to reduce the complexity of mechanics models despite the obvious physical inaccuracies that each incurs individually. In concert, it is well known that the interaction of such idealized approximations can lead to conflicting and even paradoxical results. As robotics modeling moves from the consideration of isolated behaviors to the analysis of tasks requiring their composition, a mathematically tractable framework for building models that combine these simple approximations yet achieve reliable results is overdue. In this paper we present a formal hybrid dynamical system model that introduces suitably restricted compositions of these familiar abstractions with the guarantee of consistency analogous to global existence and uniqueness in classical dynamical systems. The hybrid system developed here provides a discontinuous but self-consistent approximation to the continuous (though possibly very stiff and fast) dynamics of a physical robot undergoing intermittent impacts. The modeling choices sacrifice some quantitative numerical efficiencies while maintaining qualitatively correct and analytically tractable results with consistency guarantees promoting their use in formal reasoning about mechanism, feedback control, and behavior design in robots that make and break contact with their environment.