 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA General Framework for Structured Learning of Mechanical Systems
Paper and Code
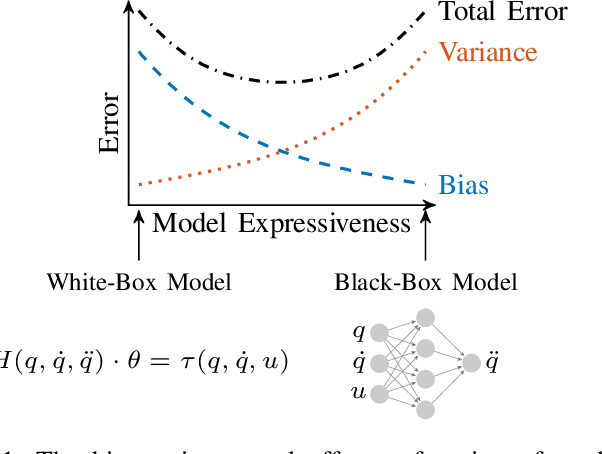

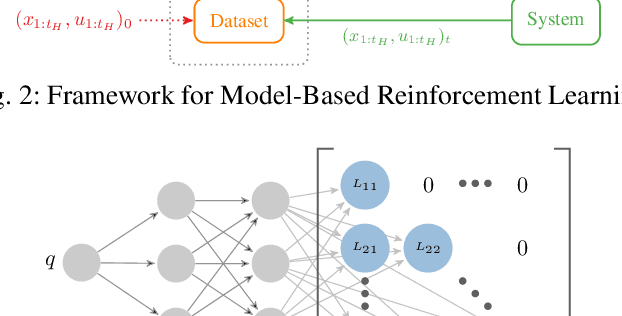

Learning accurate dynamics models is necessary for optimal, compliant control of robotic systems. Current approaches to white-box modeling using analytic parameterizations, or black-box modeling using neural networks, can suffer from high bias or high variance. We address the need for a flexible, gray-box model of mechanical systems that can seamlessly incorporate prior knowledge where it is available, and train expressive function approximators where it is not. We propose to parameterize a mechanical system using neural networks to model its Lagrangian and the generalized forces that act on it. We test our method on a simulated, actuated double pendulum. We show that our method outperforms a naive, black-box model in terms of data-efficiency, as well as performance in model-based reinforcement learning. We also conduct a systematic study of our method's ability to incorporate available prior knowledge about the system to improve data efficiency.