 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Evaluating 6-DOF Object Trackers
Paper and Code
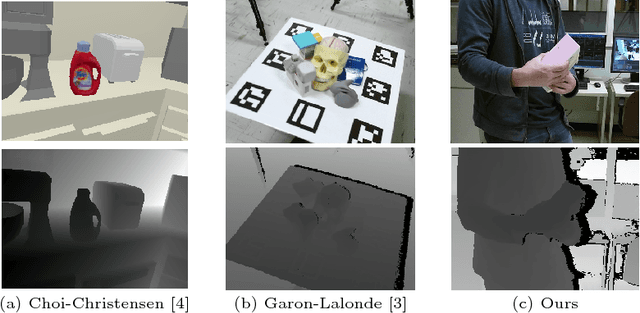
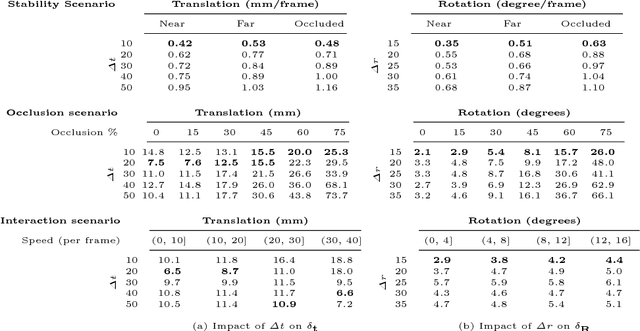


We present a challenging and realistic novel dataset for evaluating 6-DOF object tracking algorithms. Existing datasets show serious limitations---notably, unrealistic synthetic data, or real data with large fiducial markers---preventing the community from obtaining an accurate picture of the state-of-the-art. Using a data acquisition pipeline based on a commercial motion capture system for acquiring accurate ground truth poses of real objects with respect to a Kinect V2 camera, we build a dataset which contains a total of 297 calibrated sequences. They are acquired in three different scenarios to evaluate the performance of trackers: stability, robustness to occlusion and accuracy during challenging interactions between a person and the object. We conduct an extensive study of a deep 6-DOF tracking architecture and determine a set of optimal parameters. We enhance the architecture and the training methodology to train a 6-DOF tracker that can robustly generalize to objects never seen during training, and demonstrate favorable performance compared to previous approaches trained specifically on the objects to track.