 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Double Jaw Hand Designed for Multi-object Assembly
Paper and Code
Jul 30, 2018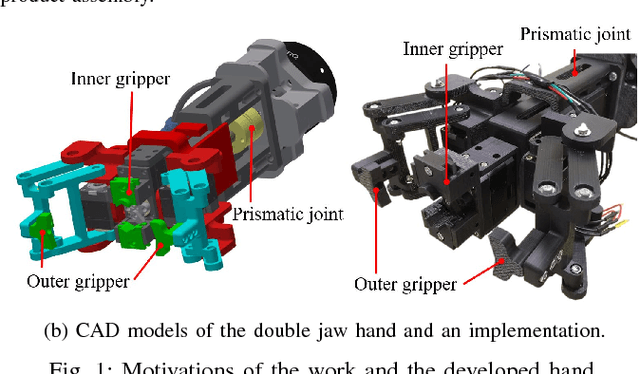



This paper presents a double jaw hand for industrial assembly. The hand comprises two orthogonal parallel grippers with different mechanisms. The inner gripper is made of a crank-slider mechanism which is compact and able to firmly hold objects like shafts. The outer gripper is made of a parallelogram that has large stroke to hold big objects like pulleys. The two grippers are connected by a prismatic joint along the hand's approaching vector. The hand is able to hold two objects and perform in-hand manipulation like pull-in (insertion) and push-out (ejection). This paper presents the detailed design and implementation of the hand, and demonstrates the advantages by performing experiments on two sets of peg-in-multi-hole assembly tasks as parts of the World Robot Challenge (WRC) 2018 using a bimanual robot.