 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Divide-and-Merge Point Cloud Clustering Algorithm for LiDAR Panoptic Segmentation
Paper and Code
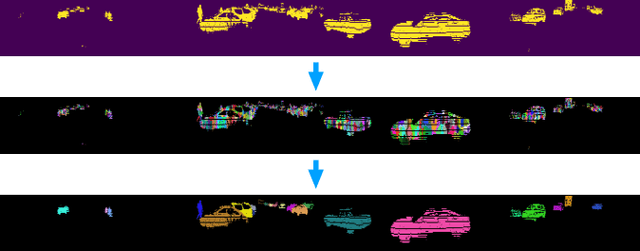
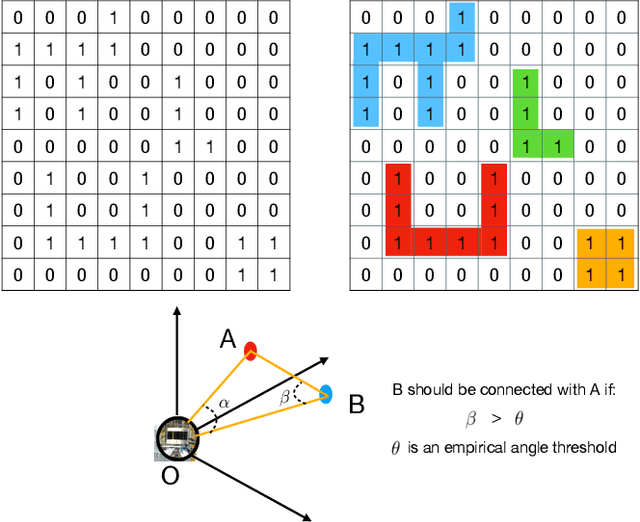
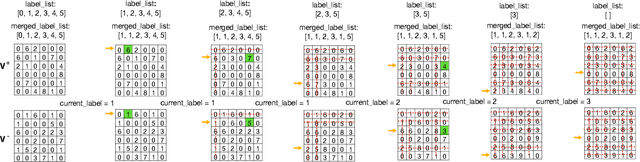
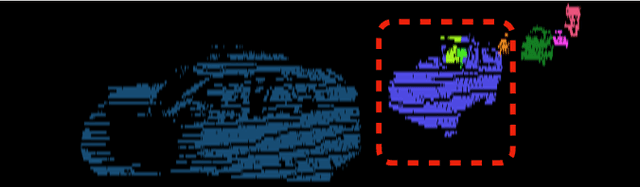
Clustering objects from the LiDAR point cloud is an important research problem with many applications such as autonomous driving. To meet the real-time requirement, existing research proposed to apply the connected-component-labeling (CCL) technique on LiDAR spherical range image with a heuristic condition to check if two neighbor points are connected. However, LiDAR range image is different from a binary image which has a deterministic condition to tell if two pixels belong to the same component. The heuristic condition used on the LiDAR range image only works empirically, which suggests the LiDAR clustering algorithm should be robust to potential failures of the empirical heuristic condition. To overcome this challenge, this paper proposes a divide-and-merge LiDAR clustering algorithm. This algorithm firstly conducts clustering in each evenly divided local region, then merges the local clustered small components by voting on edge point pairs. Assuming there are $N$ LiDAR points of objects in total with $m$ divided local regions, the time complexity of the proposed algorithm is $O(N)+O(m^2)$. A smaller $m$ means the voting will involve more neighbor points, but the time complexity will become larger. So the $m$ controls the trade-off between the time complexity and the clustering accuracy. A proper $m$ helps the proposed algorithm work in real-time as well as maintain good performance. We evaluate the divide-and-merge clustering algorithm on the SemanticKITTI panoptic segmentation benchmark by cascading it with a state-of-the-art semantic segmentation model. The final performance evaluated through the leaderboard achieves the best among all published methods. The proposed algorithm is implemented with C++ and wrapped as a python function. It can be easily used with the modern deep learning framework in python.