Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Distributed Online Convex Optimization Algorithm with Improved Dynamic Regret
Paper and Code
Nov 12, 2019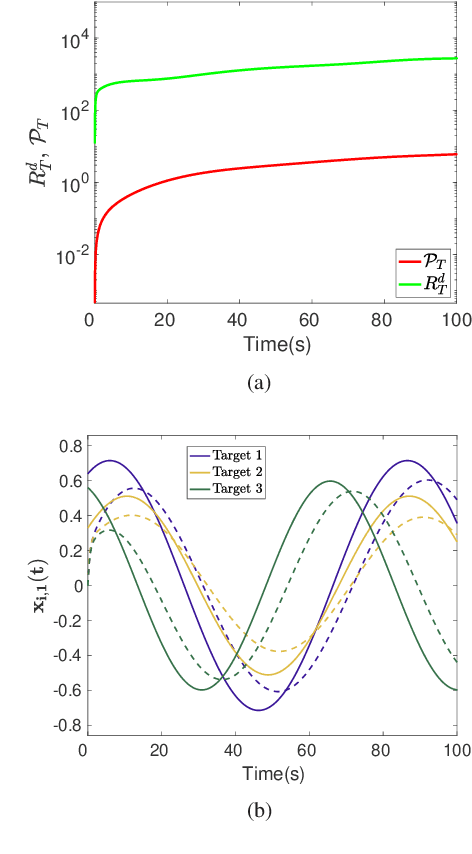

In this paper, we consider the problem of distributed online convex optimization, where a network of local agents aim to jointly optimize a convex function over a period of multiple time steps. The agents do not have any information about the future. Existing algorithms have established dynamic regret bounds that have explicit dependence on the number of time steps. In this work, we show that we can remove this dependence assuming that the local objective functions are strongly convex. More precisely, we propose a gradient tracking algorithm where agents jointly communicate and descend based on corrected gradient steps. We verify our theoretical results through numerical experiments.
View paper on