 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Distilled Model for Tracking and Tracker Fusion
Paper and Code

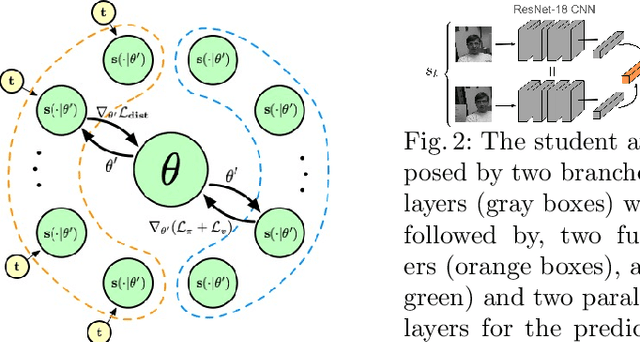


Visual object tracking was generally tackled by reasoning independently on fast processing algorithms, accurate online adaptation methods, and fusion of trackers. In this paper, we unify such goals by proposing a novel tracking methodology that takes advantage of other visual trackers, offline and online. A compact student model is trained via the marriage of knowledge distillation and reinforcement learning. The first allows to transfer and compress tracking knowledge of other trackers. The second enables the learning of evaluation measures which are then exploited online. After learning, the student can be ultimately used to build (i) a very fast single-shot tracker, (ii) a tracker with a simple and effective online adaptation mechanism, (iii) a tracker that performs fusion of other trackers. Extensive validation shows that the proposed algorithms compete with state-of-the-art trackers while running in real-time.