 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning-based Global and Segmentation-based Semantic Feature Fusion Approach for Indoor Scene Classification
Paper and Code
Feb 13, 2023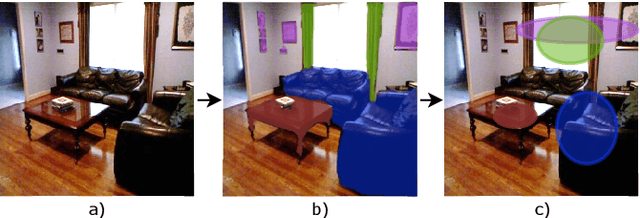
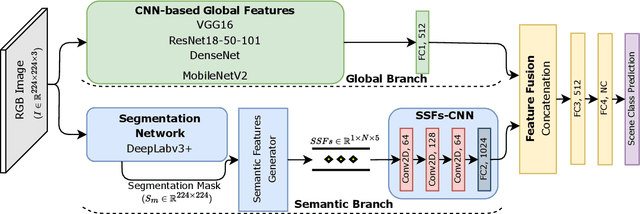
Indoor scene classification has become an important task in perception modules and has been widely used in various applications. However, problems such as intra-category variability and inter-category similarity have been holding back the models' performance, which leads to the need for new types of features to obtain a more meaningful scene representation. A semantic segmentation mask provides pixel-level information about the objects available in the scene, which makes it a promising source of information to obtain a more meaningful local representation of the scene. Therefore, in this work, a novel approach that uses a semantic segmentation mask to obtain a 2D spatial layout of the object categories across the scene, designated by segmentation-based semantic features (SSFs), is proposed. These features represent, per object category, the pixel count, as well as the 2D average position and respective standard deviation values. Moreover, a two-branch network, GS2F2App, that exploits CNN-based global features extracted from RGB images and the segmentation-based features extracted from the proposed SSFs, is also proposed. GS2F2App was evaluated in two indoor scene benchmark datasets: the SUN RGB-D and the NYU Depth V2, achieving state-of-the-art results on both datasets.