 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Approach for Robust Corridor Following
Paper and Code
Nov 18, 2019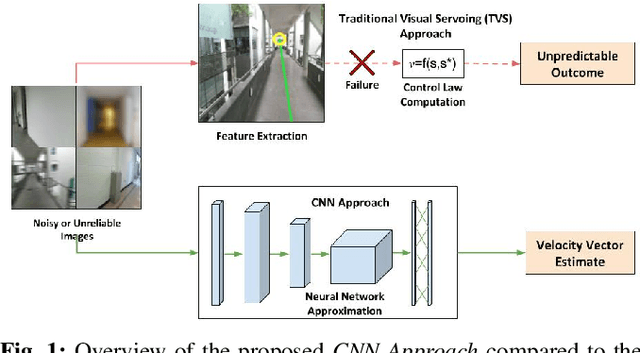
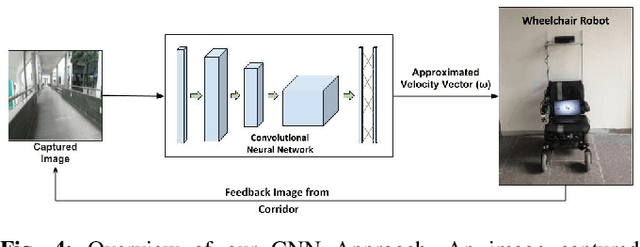
For an autonomous corridor following task where the environment is continuously changing, several forms of environmental noise prevent an automated feature extraction procedure from performing reliably. Moreover, in cases where pre-defined features are absent from the captured data, a well defined control signal for performing the servoing task fails to get produced. In order to overcome these drawbacks, we present in this work, using a convolutional neural network (CNN) to directly estimate the required control signal from an image, encompassing feature extraction and control law computation into one single end-to-end framework. In particular, we study the task of autonomous corridor following using a CNN and present clear advantages in cases where a traditional method used for performing the same task fails to give a reliable outcome. We evaluate the performance of our method on this task on a Wheelchair Platform developed at our institute for this purpose.