 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Decentralized Cooperative Navigation Approach for Visual Homing Networks
Paper and Code
Oct 02, 2023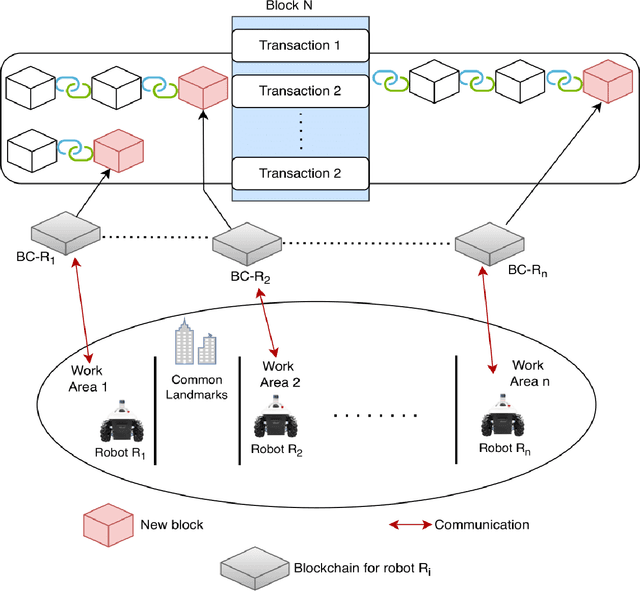

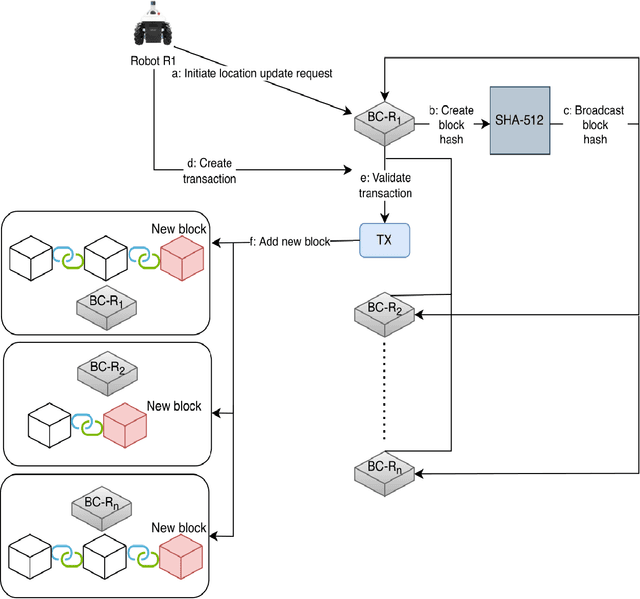
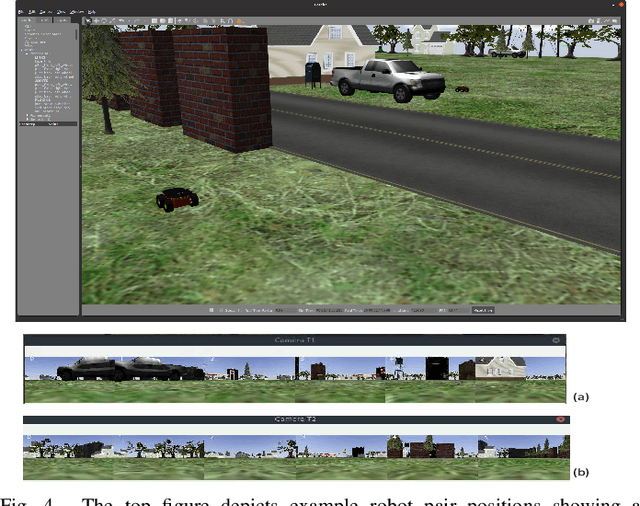
Visual homing is a lightweight approach to visual navigation. Given the stored information of an initial 'home' location, the navigation task back to this location is achieved from any other location by comparing the stored home information to the current image and extracting a motion vector. A challenge that constrains the applicability of visual homing is that the home location must be within the robot's field of view to initiate the homing process. Thus, we propose a blockchain approach to visual navigation for a heterogeneous robot team over a wide area of visual navigation. Because it does not require map data structures, the approach is useful for robot platforms with a small computational footprint, and because it leverages current visual information, it supports a resilient and adaptive path selection. Further, we present a lightweight Proof-of-Work (PoW) mechanism for reaching consensus in the untrustworthy visual homing network.