 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Informed Analysis of Scalable Supervision for Safety in Autonomous Vehicle Fleets
Paper and Code
Sep 14, 2024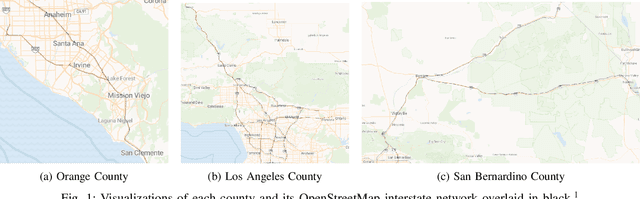
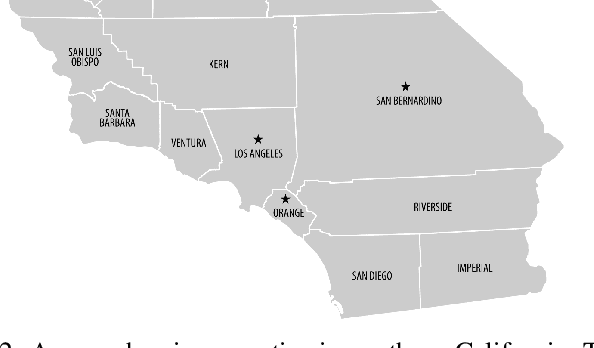
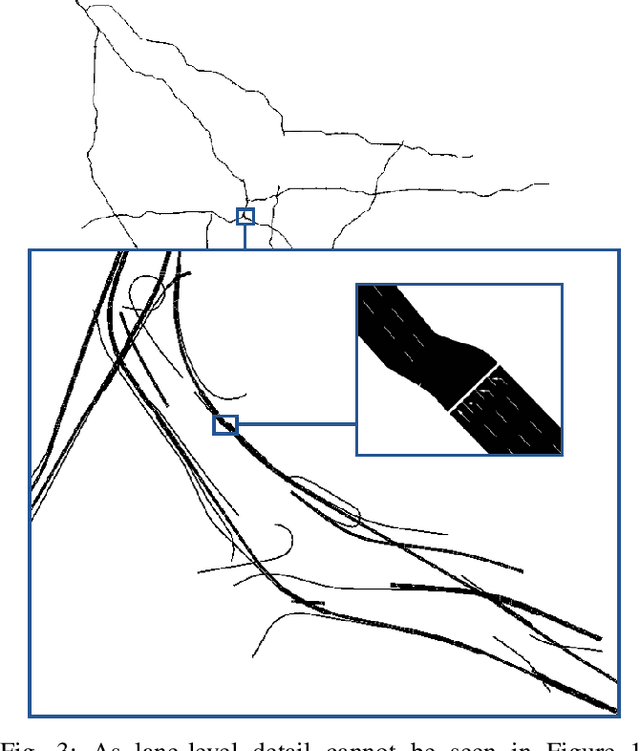
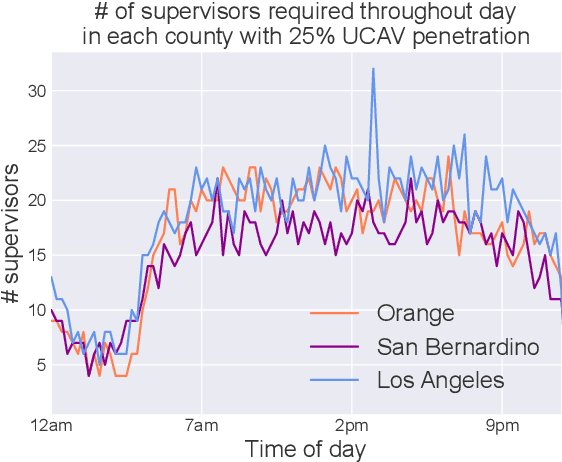
Autonomous driving is a highly anticipated approach toward eliminating roadway fatalities. At the same time, the bar for safety is both high and costly to verify. This work considers the role of remotely-located human operators supervising a fleet of autonomous vehicles (AVs) for safety. Such a 'scalable supervision' concept was previously proposed to bridge the gap between still-maturing autonomy technology and the pressure to begin commercial offerings of autonomous driving. The present article proposes DISCES, a framework for Data-Informed Safety-Critical Event Simulation, to investigate the practicality of this concept from a dynamic network loading standpoint. With a focus on the safety-critical context of AVs merging into mixed-autonomy traffic, vehicular arrival processes at 1,097 highway merge points are modeled using microscopic traffic reconstruction with historical data from interstates across three California counties. Combined with a queuing theoretic model, these results characterize the dynamic supervision requirements and thereby scalability of the teleoperation approach. Across all scenarios we find reductions in operator requirements greater than 99% as compared to in-vehicle supervisors for the time period analyzed. The work also demonstrates two methods for reducing these empirical supervision requirements: (i) the use of cooperative connected AVs -- which are shown to produce an average 3.67 orders-of-magnitude system reliability improvement across the scenarios studied -- and (ii) aggregation across larger regions.