 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparison of Few-Shot Learning Methods for Underwater Optical and Sonar Image Classification
Paper and Code
May 10, 2020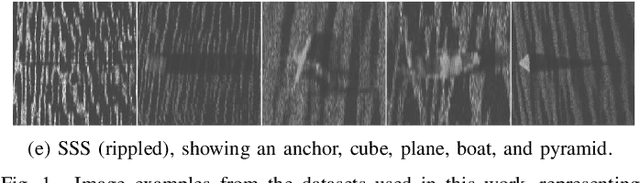
Deep convolutional neural networks have shown to perform well in underwater object recognition tasks, on both optical and sonar images. However, many such methods require hundreds, if not thousands, of images per class to generalize well to unseen examples. This is restricting in situations where obtaining and labeling larger volumes of data is impractical, such as observing a rare object, performing real-time operations, or operating in new underwater environments. Finding an algorithm capable of learning from only a few samples could reduce the time spent obtaining and labeling datasets, and accelerate the training of deep-learning models. To the best of our knowledge, this is the first paper to evaluate and compare several Few-Shot Learning (FSL) methods using underwater optical and side-scan sonar imagery. Our results show that FSL methods offer a significant advantage over the traditional transfer learning methods that employ fine-tuning of pre-trained models. Our findings show that FSL methods are not too far from being used on real-world robotics scenarios and expanding the capabilities of autonomous underwater systems.