 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Coarse-to-Fine Framework for Dual-Arm Manipulation of Deformable Linear Objects with Whole-Body Obstacle Avoidance
Paper and Code
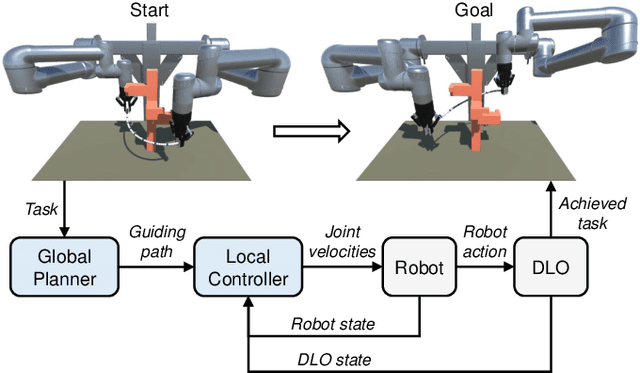



Manipulating deformable linear objects (DLOs) to achieve desired shapes in constrained environments with obstacles is a meaningful but challenging tasks. Global planning is necessary for such a highly-constrained task; however, accurate models of DLOs required by planners are difficult to obtain owing to their deformable nature, and the inevitable modeling errors significantly affect the planning results, probably resulting in task failure if the robot simply executes the planned path in an open-loop manner. In this paper, we propose a coarse-to-fine framework to combine global planning and local control for dual-arm manipulation of DLOs, capable of precisely achieving desired configurations and avoiding potential collisions between the DLO, robot, and obstacles. Specifically, the global planner refers to a simple yet effective DLO energy model and computes a coarse path to guarantee the feasibility of the task; then the local controller follows that path as guidance and further shapes it with closed-loop feedback to compensate for the planning errors and guarantee the accuracy of the task. Both simulations and real-world experiments demonstrate that our framework can robustly achieve desired DLO configurations in constrained environments with imprecise DLO models. which may not be reliably achieved by only planning or control.