 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Detect to Track System for Robust Visual Object Tracking and Semi-Supervised Model Learning
Paper and Code
May 05, 2022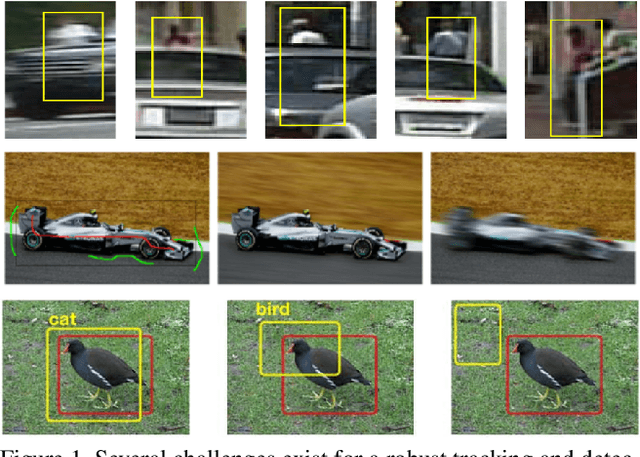
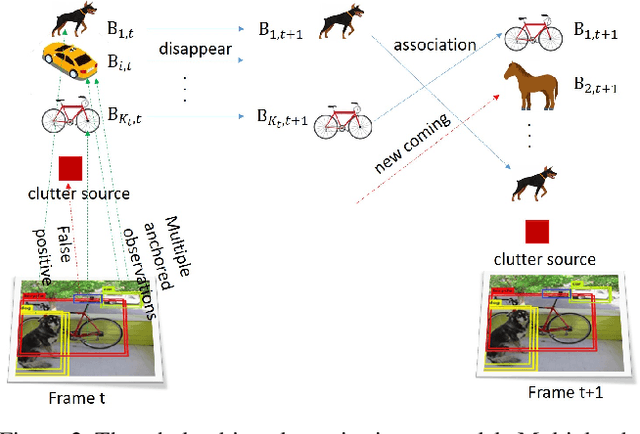
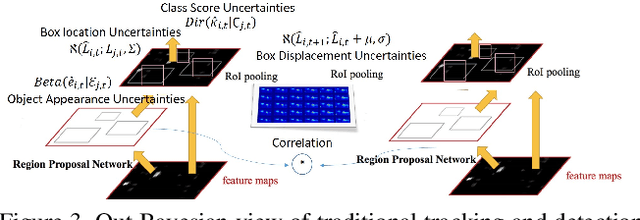
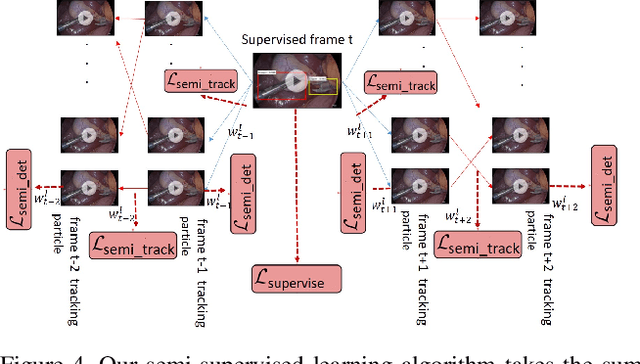
Object tracking is one of the fundamental problems in visual recognition tasks and has achieved significant improvements in recent years. The achievements often come with the price of enormous hardware consumption and expensive labor effort for consecutive labeling. A missing ingredient for robust tracking is achieving performance with minimal modification on network structure and semi-supervised learning intermittent labeled frames. In this paper, we ad-dress these problems in a Bayesian tracking and detection framework parameterized by neural network outputs. In our framework, the tracking and detection process is formulated in a probabilistic way as multi-objects dynamics and network detection uncertainties. With our formulation, we propose a particle filter-based approximate sampling algorithm for tracking object state estimation. Based on our particle filter inference algorithm, a semi-supervised learn-ing algorithm is utilized for learning tracking network on intermittent labeled frames by variational inference. In our experiments, we provide both mAP and probability-based detection measurements for comparison between our algorithm with non-Bayesian solutions. We also train a semi-supervised tracking network on M2Cai16-Tool-Locations Dataset and compare our results with supervised learning on fully labeled frames.